|
|






 Arabic
Arabic Bengali
Bengali Chinese
Chinese English
English French
French German
German Hebrew
Hebrew Hindi
Hindi Italian
Italian Japanese
Japanese Korean
Korean Malay
Malay Polish
Polish Portuguese
Portuguese Spanish
Spanish Turkish
Turkish Ukrainian
Ukrainian Vietnamese
Vietnamese|
ENCICLOPEDIA DELLA RADIOELETTRONICA ED ELETTRICA Dispositivo per il monitoraggio remoto dello stato di salute dei sensori piezoelettrici
Enciclopedia della radioelettronica e dell'elettrotecnica / Dispositivi di sicurezza e segnalazione di oggetti Il pericolo delle conseguenze di un incidente rende necessario imporre maggiori requisiti di affidabilità del canale di misura e, soprattutto, del sensore, poiché esso opera nelle condizioni più difficili che esistono in questa struttura. È necessario controllare le sue proprietà come mezzo di misurazione più spesso di quanto non avvenga con la verifica periodica (di solito una volta all'anno). Poiché il sensore è spesso installato in un luogo difficile da raggiungere (ad esempio, sotto l'involucro dell'unità), il controllo deve essere effettuato a distanza. Il metodo di controllo [1], implementato nel dispositivo descritto e che lo rende possibile, si basa sul fatto che il trasduttore piezoelettrico del sensore è reversibile, genera un segnale elettrico quando viene agito meccanicamente e subisce una deformazione meccanica quando un viene applicata la tensione. In entrambi i casi, il livello di risposta all'urto è determinato dallo stesso coefficiente, detto piezomodulo. L'inerzia del sensore come sistema meccanico è determinata dalla frequenza delle sue oscillazioni libere, che dipende principalmente dalle proprietà del sensore stesso, ma anche dalle proprietà meccaniche della parte dell'oggetto a contatto con il sensore. Si chiama frequenza della risonanza dell'installazione (UR). L'inerzia elettrica non è correlata a quella meccanica ed è determinata in prima approssimazione dal prodotto della capacità del sensore con il cavo e la resistenza attiva del suo carico. Lo spettro di frequenza della vibrazione misurata dal sensore è sempre al di sotto della frequenza SD (altrimenti il risultato della misura sarà inaffidabile), occupando, di regola, l'area da zero a 0,2...0,3 del suo valore. Per connettersi al dispositivo di controllo descritto, il sensore viene scollegato dall'apparecchiatura con cui funziona. Ad esso viene applicata una tensione costante, caricando la sua capacità e deformando l'elemento piezoelettrico. La durata di questa operazione dovrebbe essere tale che tutti i processi meccanici ed elettrici transitori abbiano il tempo di terminare. Successivamente, la sorgente di tensione viene scollegata dal sensore e una piccola resistenza attiva viene collegata ai terminali di quest'ultimo per un tempo (solitamente alcune decine di microsecondi) sufficiente per la quasi completa scarica della capacità del sensore. La deformazione meccanica dell'elemento piezoelettrico non può variare alla stessa velocità, il suo ritorno allo stato iniziale avviene sotto forma di oscillazioni smorzate con la frequenza SD. L'elemento piezoelettrico converte queste oscillazioni in un segnale elettrico, che viene registrato, ad esempio, da un oscilloscopio a memoria. Un segno dello stato normale del sensore è l'invariabilità della forma e del livello del segnale durante il monitoraggio ripetuto. I nodi principali del dispositivo di controllo sono due vibratori singoli, che regolano la durata degli intervalli di chiusura e registrazione, e due interruttori. L'eccitazione delle oscillazioni per decadimento dell'impulso con una durata stabile del circuito consente di ottenere una buona ripetibilità del livello e della forma del segnale elettrico, necessaria per le operazioni metrologiche. La versione descritta del dispositivo è un po' più complicata. Poiché l'oscilloscopio a memoria è un dispositivo costoso e relativamente raro, il processo di controllo è reso ciclico, il che ha reso possibile l'utilizzo di un oscilloscopio convenzionale. Per una maggiore affidabilità nella determinazione della frequenza di SD, viene introdotto un filtro che sopprime le interferenze ad alta frequenza. È presente un alimentatore autonomo a bassa tensione e un frequenzimetro UR con indicatore LED.
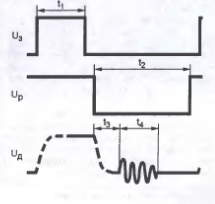
Lo schema del dispositivo è mostrato in fig. 1. Il multivibratore sugli elementi DD1.1 e DD1.2 genera impulsi rettangolari. Dall'uscita dell'elemento DD1.2, un impulso di durata t viene inviato all'ingresso di comando dell'interruttore DA1.3. Durante il suo funzionamento viene fornita una tensione di carica di +1 V tramite un interruttore chiuso all'ingresso del sensore collegato al connettore X14 tramite il circuito R15R3HL12 (curva U3 in Fig. 2).
La capacità del sensore viene caricata fino a questa tensione. Il LED HL3 è progettato per segnalare un cortocircuito nel circuito del sensore. L'impulso, inverso rispetto a quello considerato, proviene dall'uscita dell'elemento DD1.1 attraverso i circuiti differenziatori (C2R6) e integrativi (C4R11) agli ingressi dell'elemento DD1.3. Alla sua uscita si forma un impulso di livello logico basso, situato nella pausa tra gli impulsi di carica, ma avente una durata t2 inferiore alla pausa. Attraverso il circuito differenziatore C6R18, il fronte di discesa di questo impulso avvia un unico vibratore sul timer DA6, il cui impulso, con una durata determinata dai parametri del circuito R21C7 (intervallo t3 in Fig. 2), viene inviato al ingresso di controllo dell'interruttore inferiore (a seconda del circuito) del microcircuito DA2. In questo caso, l'uscita del sensore (pin 3 del connettore X1) è collegata a un filo comune attraverso l'interruttore e la resistenza R12, scaricando la capacità del sensore. La tensione attraverso il sensore (curva U in Fig. 2) diminuisce a zero. Il fronte di discesa dell'impulso del timer avvia un unico vibratore sugli elementi DD6.1 e DD6.3, generando un impulso di durata t4 (determinata dai parametri del circuito C13R31R53) ora di natura oscillatoria, tramite il circuito differenziatore C6.2R2 viene alimentato all'ingresso dell'amplificatore sull'amplificatore operazionale DA5, alla cui uscita, attraverso il resistore R16, l'interruttore SA4 collega il condensatore C25 (modalità "Indicazione") o il resistore R3 (modalità "Diagnostica"). Nel primo caso si forma un filtro di livellamento, nel secondo un divisore di tensione indipendente dalla frequenza. Successivamente, il segnale va al connettore X8, a cui è collegato un oscilloscopio o un altro registratore. Allo stesso connettore viene emesso un impulso di sincronizzazione che coincide con l'inizio dell'intervallo t27. I restanti nodi del dispositivo formano un frequenzimetro UR. Il segnale del sensore con l'aiuto dell'amplificatore DA3 e del comparatore di tensione DA5 viene convertito in una serie di impulsi di ampiezza standard. Il guadagno (10 o 20) è selezionato dall'interruttore SA2, il cui stato è indicato dai LED HL1 e HL2. Contando gli impulsi dall'uscita del comparatore per 1 ms darebbe il valore della frequenza della SD in kilohertz. Tuttavia, questo metodo si è rivelato inaccettabile, poiché le oscillazioni naturali dei moderni sensori piezoelettrici decadono molto più velocemente. Pertanto, è stato necessario contare gli impulsi per diversi intervalli più brevi con una durata totale di 1 ms. L'esperimento ha mostrato che due intervalli di 500 μs sono abbastanza sufficienti. Il conto procede come segue. Dopo aver premuto il pulsante SB2 "Set. 0", il contatore DD2.1 si porta nello stato di disponibilità al conteggio, indicato dal LED HL4 "Ready", e i contatori DD4 e DD5 vengono azzerati. Una pressione prolungata sul pulsante SB1 "Start" apre l'interruttore DA1.1 e gli impulsi di clock dall'uscita dell'elemento DD1.2 passano attraverso l'interruttore aperto DA1.2 al contatore DD2.1. I due ingressi dei segnali dell'elemento DD3.2 provengono dalle uscite 2 e 4 del contatore e il suo terzo ingresso dall'uscita dell'elemento DD6.2. Di conseguenza, un livello alto all'uscita dell'elemento DD3.3 esiste solo durante i cicli di funzionamento successivi al sesto e settimo impulso di carica (contando dal momento in cui viene premuto il pulsante SB1). L'ottavo impulso imposta un livello alto sull'uscita 8 del contatore DD2.1, che chiude l'interruttore DA3.1 tramite l'inverter DD1.2. Il flusso di impulsi all'ingresso del contatore DD2.1 si interrompe e il LED HL4 si spegne. Ora è possibile rilasciare il pulsante SB1. L'uscita dell'elemento DD3.3 è collegata all'ingresso di comando dell'interruttore DA1.4, collegato tra l'uscita del comparatore DA5 e l'ingresso del contatore DD4. L'indicazione dello stato dei contatori DD4 e DD5 non è del tutto normale, utilizzando due linee di LED da dieci giorni HL5-HL24. Questo è stato fatto per ridurre il consumo di corrente: il consumo totale di tutti questi LED non supera comunque gli 8 mA. Sfortunatamente, LCD ancora più economici non sono adatti a causa dell'insufficiente intervallo di temperatura di esercizio. I diodi VD1-VD3 introdotti per ridurre la diafonia. Tutti i condensatori nel dispositivo sono ceramici e C7 e C13 devono avere un piccolo TKE, possono essere diversi, ad esempio mica. Termostabili (ad esempio C2-31) dovrebbero essere anche i resistori R21 e R31. Interruttori - scorrevoli di piccole dimensioni B1561. Tuttavia, al posto di SA3, è meglio utilizzare un pulsante con contatti in commutazione, ad esempio PS580N. La posizione dei contatti al rilascio del pulsante deve corrispondere a quella mostrata nello schema di Fig. uno. Il tipo di connettore X1 dipende da quali sensori devono essere controllati più spesso. L'autore ha utilizzato una presa a blocco RS-4TV, poiché la maggior parte dei sensori di vibrazioni industriali domestici sono accelerometri piezoelettrici ABC e ANS con prese per cavi RS-4TV, la cui assegnazione dei contatti corrisponde a quella mostrata nel diagramma di Fig. 1. Poiché in questo caso non è richiesta la resistenza alle vibrazioni da una connessione staccabile, si consiglia di rimuovere con attenzione la filettatura esterna sul corpo della spina, che faciliterà e accelererà il processo di connessione e disconnessione dei sensori. Sensori di altro tipo possono essere collegati al dispositivo tramite appositi adattatori. Il connettore X2 può essere qualsiasi, ad esempio ONTS-VG-2-3/16-r. Il filo del segnale nel cavo ad esso collegato deve essere schermato, il filo del segnale dell'orologio non necessita di schermatura.
Il dispositivo è alimentato da una batteria da cinque a sei celle galvaniche di dimensione AA, la cui tensione viene convertita in un bipolare stabilizzato +/-12 V tramite un convertitore TMR0522 [2], collegato secondo il circuito mostrato in fig. 3. Quando la tensione della batteria GB1 è 7,5 V, la corrente assorbita da essa è rispettivamente di 130 e 145 mA nelle modalità "Diagnostica" e "Indicazione". Il dispositivo è assemblato su due schede, una sopra l'altra e collegate da cavi piatti. Controlli e LED sono montati sulla scheda superiore e il resto degli elementi è montato sulla scheda inferiore, ad eccezione dei connettori, che si trovano su un pannello angolare separato. Il corpo è selezionato pronto. Poiché la maggior parte degli elementi attivi sono porte logiche e amplificatori operazionali senza correzione esterna, la configurazione di un dispositivo cablato correttamente non richiede molto sforzo. Dopo aver verificato che il multivibratore sugli elementi DD1.1, DD1.2 generi impulsi rettangolari simmetrici con una frequenza di ripetizione di 30 ± 5 Hz, è necessario verificare la posizione e la forma degli impulsi all'uscita dell'elemento DD1.3 .
In assenza di un oscilloscopio a due raggi, per questo è possibile utilizzare il sommatore più semplice, il cui circuito è mostrato in Fig. quattro.
L'oscillogramma del segnale alla sua uscita dovrebbe avere la forma mostrata in Fig. 5, dove t1 e t2 sono gli stessi intervalli di fig. 2. Selezionando i resistori R6 e R11, assicurarsi che l'intervallo t2 inizi dopo 0,3 ... 1 ms dopo la fine dell'impulso di carica. La sua durata dovrebbe essere 5 ... 10 ms, il valore esatto non è importante. L'impulso generato dal timer DA6 deve avere una durata compresa tra 20 ... 30 μs. Ma la durata dell'impulso all'uscita dell'elemento DD6.2 deve essere impostata con un resistore di sintonia R53 pari a 500 μs con la massima precisione possibile. Ciò influisce direttamente sull'errore di misurazione della frequenza SD.
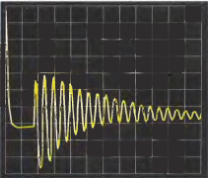
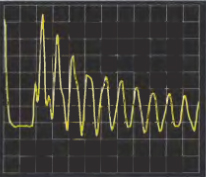
Per ulteriori regolazioni è necessario un sensore piezoelettrico (accelerometro), preferibilmente con un coefficiente di conversione dell'ordine dei millivolt per metro al secondo al secondo e una frequenza di oscillazione libera (è superiore alla frequenza SD) superiore a 10 kHz. Collegando il sensore al connettore X1, i controlli dell'oscilloscopio collegato al connettore X2 ottengono un'immagine stabile sullo schermo, simile a quella mostrata in Fig. 6-8. Presentano oscillogrammi che illustrano la dipendenza del segnale dallo stato del sensore: sciolto (Fig. 6); installato nel rigoroso rispetto del manuale di istruzioni (Fig. 7); installato, ma con fissaggio allentato alla struttura controllata (Fig. 8). La scala degli oscillogrammi lungo l'asse verticale e orizzontale è rispettivamente di 50 mV/div. e 50 µs/div. La ripetibilità delle oscillazioni eccitate è caratterizzata dai risultati della misurazione della posizione dei punti caratteristici degli oscillogrammi con una ripetizione di dieci volte dell'eccitazione. Lo spread non ha superato l'1,5% e praticamente ha coinciso con l'errore dell'oscilloscopio a memoria S9-8 utilizzato. È auspicabile assicurarsi che non vi sia distorsione del segnale all'uscita dell'amplificatore operazionale DA3. In pratica, sono improbabili, la gamma di oscillazioni smorzate di sensori di diverso tipo varia leggermente e non supera le diverse centinaia di millivolt. Quando si verifica il funzionamento del trigger Schmitt sul comparatore DA5, è necessario confrontare il numero di periodi del segnale al suo ingresso e gli impulsi all'uscita. Le soglie di trigger sono impostate da una selezione di resistori R19 e R23. Il primo controllo del sensore, appositamente progettato per lavorare su un oggetto operativo a lungo termine e senza interruzioni, è auspicabile da eseguire immediatamente dopo la sua installazione. In questo caso, risulterà immediatamente chiaro se tutti i requisiti sono soddisfatti (non planarità e rugosità ammissibili della superficie di appoggio, coppia di serraggio della filettatura, assenza di contaminazione, ecc.). La loro violazione può ridurre la frequenza della SD a tal punto che il segnale del sensore non rifletterà correttamente la natura della vibrazione. Di conseguenza, è possibile generare un falso comando per un arresto di emergenza dell'oggetto. Viene registrato il risultato ottenuto (contando la frequenza della SD e la posizione dell'interruttore SA2) che servirà come base per valutare lo stato del sensore durante i successivi cicli di controllo. La deviazione osservata servirà come base per uno studio più dettagliato delle condizioni del sensore e una decisione sulla necessità di ripararlo o sostituirlo. Ciò implica che il controllo viene effettuato su un'unità ferma. La sua temperatura non è necessariamente costante e l'effetto utilizzato è sensibile al suo cambiamento. Come accennato in precedenza, in entrambe le fasi del processo di eccitazione delle oscillazioni, le reazioni all'impatto sono determinate dal valore del modulo piezoelettrico, le caratteristiche del materiale del trasduttore, che dipende dal grado di ordine della sua microstruttura, che diminuisce con l'aumento della temperatura. In questo caso, l'ampiezza del segnale elettrico è proporzionale al quadrato del modulo piezoelettrico e la sua dipendenza dalla temperatura è corrispondentemente più forte. Secondo l'esperimento, il segnale del sensore con una temperatura operativa massima di 250 °C durante il controllo a temperature fino a 120 °C presentava un'instabilità entro ±6%. Pertanto, è auspicabile che in tutti i cicli di controllo la dispersione della temperatura non superi i 20 °C. A tal proposito, è meglio far funzionare il dispositivo in abbinamento ad un dispositivo che consenta di misurare la temperatura del sensore. La possibilità di effettuare il controllo sull'unità operativa dipende da una serie di circostanze. Si può subito affermare che se il livello di vibrazione registrato dal sensore durante il normale funzionamento dell'oggetto è prossimo al limite per il sensore, il limite superiore dello spettro di vibrazione si avvicina alla frequenza della SD, o, infine, alla temperatura della sensore è vicino al massimo consentito, il controllo è impossibile. Dovrai eseguirlo durante gli arresti programmati dell'unità, ma anche in questo caso l'uso del dispositivo farà risparmiare tempo e ti libererà del lavoro meccanico. Se le circostanze sopra elencate non sono così evidenti, il controllo dovrebbe essere effettuato prima dell'avvio e durante il funzionamento dell'impianto. Confrontando i risultati, puoi prendere una decisione informata. Va tenuto presente che il controllo utilizzando solo gli indicatori integrati del dispositivo descritto implementa solo una parte delle possibilità. L'analisi dello spettro o di altre caratteristiche delle vibrazioni naturali del sensore consentiranno non solo di valutarne più accuratamente le condizioni, ma anche di ottenere ulteriori informazioni sullo stato di salute del nodo dell'oggetto su cui è installato il sensore. Il fatto è che il limite superiore dello spettro del segnale del sensore ottenuto durante il suo normale funzionamento, molto spesso non supera i 1000 Hz e talvolta anche inferiore. Piccoli difetti sull'oggetto hanno scarso effetto sulla natura dello spettro di vibrazione. E poiché lo spettro è incomparabilmente più ampio durante il controllo, quindi, analizzandolo, è possibile notare anche piccoli cambiamenti nella situazione sull'oggetto, ovviamente, se si verificano vicino al sensore. L'analizzatore di spettro è collegato al connettore X2 al posto dell'oscilloscopio (o insieme ad esso) e l'interruttore SA3 è impostato sulla posizione "Diagnostica". Il dispositivo consente non solo di rilevare il fatto di una variazione del coefficiente di conversione del sensore causata da una modifica nel modulo piezoelettrico, ma anche di calcolarne il nuovo valore. La tecnica più semplice consiste nel confrontare i segnali durante il doppio controllo: prima, subito dopo l'installazione del sensore, quando i dati della sua recente verifica sono validi, e poi dopo il tempo per il quale ci si può aspettare variazioni dei parametri del sensore. Su entrambi i record, è necessario selezionare N periodi di oscillazione allo stesso modo, in ciascuno di essi determinare l'intervallo del segnale (la differenza tra i valori massimo e minimo) e sommare i valori ottenuti. Se durante il controllo iniziale è stata ottenuta la somma V1, e durante il controllo ripetuto - V2, il coefficiente di conversione al momento del controllo ripetuto è pari a
dove S1 è il valore del coefficiente di conversione ottenuto durante la verifica [3]. Può essere utilizzato nell'analisi dei risultati di misura fino alla successiva verifica standard. Un'altra applicazione del dispositivo può essere trovata nella fabbricazione di sensori piezoelettrici nelle fasi di assemblaggio e regolazione dei parametri. Sullo schermo dell'oscilloscopio, è possibile osservare la risposta del sensore alle operazioni in corso con la stessa chiarezza con cui si impostano i filtri con una spazzatrice. In questo caso è possibile ottenere informazioni non solo sulla frequenza di risonanza, ma in una certa misura anche sul valore del coefficiente di conversione. Aggiungiamo che oltre ai sensori di vibrazione, è possibile in alcuni casi controllare sensori di pulsazione di pressione piezoelettrici, tuttavia il controllo sarà solo qualitativo: secondo il principio del "buono-fallimento". Letteratura 1. Subbotin M. Metodo di eccitazione elettrica delle oscillazioni risonanti di un accelerometro piezoelettrico e un dispositivo per la sua implementazione. Brevetto RF n. 2150708. - Bollettino delle invenzioni, 2000, n. 16.
Autore: M. Subbotin, Mosca; Pubblicazione: radioradar.net
Pelle artificiale per l'emulazione del tocco
15.04.2024 Lettiera per gatti Petgugu Global
15.04.2024 L'attrattiva degli uomini premurosi
14.04.2024
▪ I grandi occhi si svegliano prima ▪ TV LCD da 60 pollici di Foxconn e Sharp ▪ Drone spaziale dell'aeronautica americana ▪ Batteria intelligente da parete per la casa
▪ sezione del sito Parole alate, unità fraseologiche. Selezione dell'articolo ▪ articolo Sui benefici dei fantasmi. L'arte dell'audio ▪ articolo Come cambia la temperatura dell'aria con l'altitudine? Risposta dettagliata ▪ articolo L'autista dell'auto-spazzaneve. Istruzioni standard sulla protezione del lavoro ▪ articolo Micrometro elettronico. Enciclopedia dell'elettronica radio e dell'ingegneria elettrica ▪ articolo Ago-mistero. Messa a fuoco segreta
Homepage | Biblioteca | Articoli | Mappa del sito | Recensioni del sito
www.diagram.com.ua |







 Lascia il tuo commento su questo articolo:
Lascia il tuo commento su questo articolo: