|
|






 Arabic
Arabic Bengali
Bengali Chinese
Chinese English
English French
French German
German Hebrew
Hebrew Hindi
Hindi Italian
Italian Japanese
Japanese Korean
Korean Malay
Malay Polish
Polish Portuguese
Portuguese Spanish
Spanish Turkish
Turkish Ukrainian
Ukrainian Vietnamese
Vietnamese|
ENCICLOPEDIA DELLA RADIOELETTRONICA ED ELETTRICA L'evoluzione degli alimentatori pulsati flyback
Enciclopedia della radioelettronica e dell'elettrotecnica / Alimentatori L'articolo che sottoponiamo all'attenzione dei lettori è dedicato agli alimentatori switching flyback, ampiamente utilizzati negli alimentatori per televisori, computer e altre apparecchiature elettroniche. Tali fonti sono popolari anche tra i radioamatori. L'articolo si concentrerà sugli alimentatori assemblati sui microcircuiti KR1033EU10 e VIPer-100A e sul loro calcolo utilizzando un pacchetto software specializzato. CONTROLLORE PWM KR1033EU10(iC3842) Gli alimentatori a commutazione (SMPS) si sono diffusi diffusamente a metà del secolo scorso. E oggi gli IIP subiscono cambiamenti evolutivi quasi ogni anno. Ciascuna classe di IIP, una volta conquistata la sua nicchia, vi rimane per sempre, o almeno per molto tempo, e si sviluppa quasi indipendentemente. Gli SMPS a ponte vengono solitamente utilizzati come quelli potenti (150 W o più). Gli SMPS a corrente inversa sono spesso utilizzati come prodotti a bassa e media potenza (fino a 150 W). Ora la base degli elementi per tali fonti viene aggiornata così rapidamente che il radioamatore medio e l'industria radiofonica nazionale seguono questi cambiamenti nei loro sviluppi con un grande ritardo. I controller PWM integrati KR1033EU5 (analogico straniero - TDA4605), descritti nell'articolo [1], non hanno ancora avuto il tempo di essere introdotti negli elettrodomestici, ma nelle apparecchiature video straniere, e in particolare nei monitor video, la loro nuova varietà è già ampiamente utilizzato: UC3842, KA3842 e UC3844 , KA3844 (analoghi domestici di KR1033EU10 e KR1033EU11, rispettivamente). Esternamente e fondamentalmente non diversi dal prototipo, i relativamente nuovi controller PWM hanno tuttavia subito una serie di miglioramenti. E se molti radioamatori hanno già conosciuto il prototipo sulle pagine di “Radio” in [2], allora le descrizioni degli SMPS con controller PWM della serie UC384X non sono ancora state pubblicate, ad eccezione di [3], dove il microcircuito specificato viene utilizzato in un modo alquanto non convenzionale: come regolatore per uno stabilizzatore di tensione a impulsi step-down. Diamo un'occhiata brevemente alle principali proprietà e differenze tra il microcircuito KR1033EU10 (UC3842, KA3842), che chiameremo ulteriormente EU10, e KR1033EU5 (TDA4605), chiamato EU5. Entrambi i microcircuiti sono realizzati in una custodia di plastica 2101.8-1 (secondo la terminologia straniera - DIP-8). Lo scopo dei pin EU10 è riportato nella tabella.
caratteristiche principali
Il controller PWM EU10, come l'EU5, è progettato per collegare un transistor ad effetto di campo a canale n con un gate isolato e sostanzialmente ha la stessa funzionalità. Notiamo la prima caratteristica dell'EU10. La frequenza di conversione nell'SMPS su EU5 viene impostata automaticamente in base alla tensione di rete, ai parametri del microcircuito e del transistor di commutazione, all'induttanza dell'avvolgimento primario del trasformatore di impulsi, al consumo energetico nel carico, ecc. Pertanto, se esposta a fattori destabilizzanti, la frequenza di conversione risulta “fluttuante”: per un qualsiasi SMPS realizzato su EU5, dipendente solo dalla potenza del carico, può assumere un valore da 18 kHz al massimo e fino a 70 kHz a carico minimo. Questa caratteristica rende alquanto difficile la progettazione di un trasformatore di questo tipo SMPS, quindi di solito vengono prima eseguiti calcoli approssimativi e prototipazione, quindi, sulla base dei risultati dei test con un carico reale, vengono apportate le modifiche necessarie. Nel microcircuito EU10, la frequenza di conversione operativa è impostata da un circuito RC di impostazione della frequenza esterno collegato al pin 4. Poiché il resistore del circuito RC è collegato a una fonte interna di tensione di riferimento di precisione di 5 V - pin 8, indipendentemente da varie destabilizzazioni fattori, la frequenza di conversione operativa è rigorosamente fissa. Nella fig. 1, a mostra la forma esponenziale della tensione Uc sul condensatore di impostazione della frequenza, corrispondente agli impulsi di commutazione all'uscita del controller PWM (pin 6 Uout), mostrato in Fig. 1, b.
Per caratterizzare la modalità operativa di un controller PWM, è conveniente utilizzare il ciclo di lavoro degli impulsi di commutazione D: questo è il parametro inverso del loro ciclo di lavoro. Il valore del ciclo di lavoro è sempre inferiore a uno. Tuttavia, non è consigliabile sceglierlo superiore a 0,5 [3]. Nel circuito di uscita del controller PWM KR1033EU11 (UC3844) è stato introdotto un trigger di conteggio aggiuntivo interno, che limita il ciclo di lavoro D≤0,5, ma allo stesso tempo il circuito RC di impostazione della frequenza è progettato per il doppio della frequenza operativa di il generatore interno (rispetto alla frequenza di ripetizione degli impulsi di commutazione). Concludendo una breve descrizione generale dei controller PWM della serie UC384X, notiamo che l'UC3843 è simile all'UC3842 e l'UC3845 è simile all'UC3844, ma sono progettati per una tensione di alimentazione inferiore. Per loro, il livello di soglia della tensione di alimentazione quando si passa allo stato "On" è per i singoli campioni 7,8...9 V (valore medio 8,4 V), "Off" - 7...8,2 V (valore medio - 7,6 V ). Spieghiamo il concetto di stabilità del rumore di un controller PWM (Fig. 1). Durante il tempo toff, il condensatore di impostazione della frequenza viene caricato da una tensione di circa 1,5 V, corrispondente al livello di soglia inferiore del comparatore interno, a quella superiore, che è di circa 2,75 V. In questo momento, l'uscita del Il controller PWM è basso. Quando la tensione sul condensatore Uc raggiunge il livello di soglia superiore, il circuito di scarica interno viene acceso e il condensatore viene scaricato a circa 0,75 V. La tensione all'uscita del controller PWM in questo momento passa allo stato singolo. Quindi durante il tempo tON. finché la tensione ai capi del condensatore non raggiunge il livello di soglia inferiore, il transistor di commutazione viene acceso. La figura mostra che un segnale di interferenza Up con una tensione di 0,1...0,5 V alla fine del ciclo di carica può causare un funzionamento prematuro del circuito di scarica e una falsa partenza del generatore interno, evidenziato dalle linee tratteggiate. Questa proprietà è il principale svantaggio della classe di controller PWM in esame, ma può essere notevolmente indebolita in diversi modi. Innanzitutto, i condensatori ceramici (a bassa induttanza) con una capacità di circa 7 μF sono collegati ai pin 8 e 0,1 del microcircuito. In secondo luogo soddisfano determinati requisiti per la topologia del circuito stampato e la struttura dell'SMPS, che riducono l'ampiezza dei segnali di disturbo, che verranno spiegati più avanti. In terzo luogo, la capacità del condensatore di impostazione della frequenza viene scelta in modo che sia almeno 1000 pF. E il modo più affidabile per eliminare completamente questo inconveniente è sincronizzare la frequenza operativa del controller PWM con una fonte esterna di tensione impulsiva, descritta in dettaglio in [4]. La seconda differenza principale tra l'EU10 è il modo in cui monitora la corrente operativa nell'SMPS. Nell'EU5, la variazione di corrente nell'avvolgimento di accumulo del trasformatore viene simulata da un circuito RC esterno e, se questi elementi vengono selezionati in modo errato, il transistor di commutazione potrebbe guastarsi. Il microcircuito EU10 ha uno speciale comparatore di controllo della corrente, che ha due ingressi: invertente e non invertente. Il pin 3 è collegato internamente all'ingresso non invertente del comparatore. Ad esso è collegato esternamente un sensore di corrente resistivo o di trasformatore nel circuito source del transistor di commutazione. Non appena la tensione del segnale proveniente dal sensore di corrente supera il valore di soglia di 1 V, corrispondente al valore di corrente di picco nel circuito di drain del transistor, il comparatore spegne l'amplificatore di uscita del controller PWM. Ad esempio, per un transistor con una corrente di drain massima di 4 A, il valore di picco corrispondente al livello di risposta della protezione viene scelto su 3,7 A. Quando l'SMPS è sovraccaricato, tale spegnimento si verificherà in ciascun impulso, prevenendo danni al transistor di commutazione. Il livello di risposta della protezione di corrente può essere regolato modificando la resistenza del resistore nel circuito di drain del transistor o modificando il coefficiente di trasmissione del sensore di corrente del trasformatore. E l'ultima, terza caratteristica dell'EU10, che deriva dalla seconda, è il metodo di regolazione della tensione all'uscita dell'SMPS. Si noti che il principio di regolazione rimane lo stesso: controllo dell'ampiezza dell'impulso. Se EU5 controlla il momento del completamento del trasferimento della parte successiva dell'energia mediante la transizione della tensione negli avvolgimenti secondari attraverso lo zero e quindi emette una nuova porzione per mantenere costante la tensione all'uscita della comunicazione ausiliaria avvolgimento, e quindi al carico, l'EU10 funziona in modo leggermente diverso. Per regolare la tensione di uscita dell'SMPS, nonché per neutralizzare l'influenza negativa dei fattori destabilizzanti, viene utilizzato l'ingresso dell'amplificatore del segnale di errore - pin 2, al quale è collegato un ulteriore avvolgimento ausiliario del trasformatore, formando così un esterno anello di feedback, chiamato anello di controllo primario. L'amplificatore monitora l'influenza disturbante dei fattori destabilizzanti e regola i parametri degli impulsi di commutazione in modo che la tensione all'uscita dell'avvolgimento di comunicazione e al carico rimanga costante. Le proprietà di frequenza e fase della caratteristica di trasferimento dell'amplificatore del segnale di errore, che ne determinano la stabilità, sono regolate da un circuito RC esterno collegato al pin 1, che è internamente collegato all'uscita di questo amplificatore. Grazie a questa architettura del microcircuito, gli sviluppatori hanno fornito la possibilità di utilizzare il pin 1 per lo spegnimento remoto o di emergenza dell'SMPS (trasferimento in MODALITÀ STANDBY - modalità standby), collegandolo a un filo comune utilizzando un transistor esterno. Se a questo pin viene collegato un sensore optoelettronico, collegato elettricamente all'uscita, si ottiene un secondo circuito di controllo della tensione di uscita, che migliora le proprietà stabilizzanti dell'SMPS e, inoltre, consente un avvio “soft” dell'SMPS. La stabilizzazione della tensione di uscita dell'SMPS avviene come segue. L'uscita dell'amplificatore del segnale di errore all'interno del microcircuito è collegata tramite circuiti di adattamento all'ingresso invertente del comparatore di controllo della corrente. Un sensore di corrente è collegato all'ingresso non invertente del comparatore. Nel comparatore di corrente, dal momento dell'inizio di ciascun impulso di commutazione, questi due segnali vengono confrontati. Se i segnali coincidono, ogni impulso di commutazione si interromperà nel momento in cui la corrente nell'avvolgimento di accumulo raggiunge il valore di picco richiesto. In modalità normale, ciò avverrà molto prima che la corrente di picco raggiunga il valore limite della corrente di drain del transistor di commutazione. A sua volta, la corrente di picco determina la potenza operativa del trasformatore. L'energia immagazzinata nell'avvolgimento di accumulo di un trasformatore con induttanza L è determinata dall'uguaglianza W = LIP2/2 e se l'accumulo di energia viene interrotto in questo momento, quando la corrente in aumento lineare nell'avvolgimento raggiunge il valore di picco IP richiesto, l'energia i circuiti di potenza secondari riceveranno la porzione di energia necessaria. Inoltre, se, a tensione costante dell'alimentazione di rete U0, confrontiamo due versioni del convertitore, che differiscono, ad esempio, di un fattore due nella frequenza di conversione, anche l'induttanza dell'avvolgimento di accumulo dovrebbe differire di un fattore due. Ciò è necessario per modificare la velocità di salita della corrente a dente di sega, determinata dal rapporto U0 /L. Pertanto, ad esempio, se la corrente nell'avvolgimento ad una frequenza di conversione di 100 kHz al momento dell'azione dell'impulso di commutazione raggiunge un valore di picco dopo 2 μs, allora ad una frequenza di 50 kHz a causa del raddoppio dell'induttanza all'avvolgimento stessa tensione U0 - dopo 4 μs. La potenza per entrambe le opzioni rimane la stessa, poiché nell'espressione che la caratterizza P=W/T (T=1/f è il periodo della frequenza di conversione) cambieranno proporzionalmente sia il numeratore che il denominatore. Ma le dimensioni del nucleo magnetico del trasformatore per queste opzioni differiranno in modo significativo: maggiore è la frequenza, minore è il nucleo magnetico richiesto per la stessa potenza. Allo stesso modo, con un'induttanza L costante e una tensione U0 variabile, l'intervallo di tempo tON varierà. durante il quale si accumula energia nell'avvolgimento primario del trasformatore, poiché è inversamente proporzionale al rapporto U0/L. Pertanto, l'energia immagazzinata in ciascun impulso rimane costante e indipendente da fattori destabilizzanti. I radioamatori che desiderano studiare più in dettaglio lo schema a blocchi, la descrizione funzionale e le caratteristiche di progettazione del microcircuito EU10 possono fare riferimento al libro di consultazione [4]. ALIMENTAZIONE SU CHIP KR1033EU10 Schema della versione più semplice proposta dell'SMPS. la cui base è il controller PWM KR1033EU10 (UC3842, KA3842), mostrato in Fig. 2.
Principali parametri di SMPS
La sorgente di tensione di rete, così come i filtri di rete a bassa e ad alta frequenza, sono progettati in modo simile al prototipo [2] e non hanno caratteristiche speciali, tranne che l'elemento che limita il picco di corrente quando l'SMPS è acceso è un termistore RK1 con TCR negativo. Quando è acceso, la sua resistenza è massima, quindi quando si riscalda sotto l'influenza della corrente consumata dal dispositivo, diminuisce. Ciò aiuta a proteggere il ponte di diodi di rete VD1 da danni durante l'avvio. Tuttavia, con un riavvio rapido, l'efficacia di tale protezione è bassa. Il divisore di tensione R1 - R3 nel circuito dell'amplificatore del segnale di errore fornisce la regolazione e la stabilizzazione della tensione di uscita SMPS utilizzando il circuito di controllo primario. Il resistore R6 fornisce alimentazione al microcircuito in modalità di avvio, quando la corrente che consuma non supera 1 mA. Dopo l'accensione dell'SMPS, la tensione di rete raddrizzata attraverso il resistore limitatore R6 viene fornita al condensatore di filtro C11 nel circuito di alimentazione del microcircuito. Quando la tensione sul condensatore raggiunge il livello di soglia affinché il microcircuito passi allo stato "on" (valore tipico - 16 V), il comparatore viene attivato e l'alimentazione verrà fornita a tutti gli elementi del controller PWM, dopodiché la tensione interna viene attivata la sorgente di tensione di riferimento, quindi il generatore di impulsi di commutazione e l'amplificatore di uscita. L'SMPS passa dalla modalità di avvio alla modalità operativa, fornendo alimentazione al microcircuito dall'avvolgimento di comunicazione ausiliario del trasformatore attraverso il diodo VD5. La corrente consumata dal microcircuito aumenta a 11...17 mA. Se la tensione nella rete diminuisce, la tensione di uscita dell'SMPS e la tensione di alimentazione del microcircuito diminuiranno gradualmente. La velocità di diminuzione della tensione di uscita è centinaia di volte inferiore alla tensione di ingresso a causa della stabilizzazione, ma arriverà un momento in cui la tensione di alimentazione del microcircuito raggiunge il livello di soglia per passare allo stato "off" (valore tipico - 10 V). In questo momento, il comparatore funzionerà e l'alimentazione di tutti gli elementi del controller verrà disattivata. La differenza (6 V) tra i livelli di soglia per l'accensione e lo spegnimento del microcircuito (isteresi della tensione di alimentazione) è necessaria per evitare commutazioni irregolari dei circuiti di alimentazione in modalità di avvio. La frequenza di ripetizione degli impulsi di commutazione (la frequenza operativa di conversione in SMPS) è determinata dai parametri del circuito R5C8. Affinché la frequenza di conversione corrisponda al valore calcolato f = 30 kHz, potrebbe essere necessario selezionare i valori degli elementi di regolazione della frequenza. Come determinare i valori richiesti degli elementi di impostazione della frequenza per una diversa frequenza operativa verrà discusso in seguito. Durante la progettazione della versione descritta dell'SMPS, è stata prestata particolare attenzione a garantirne la stabilità al rumore. In larga misura, la stabilità complessiva dell'amplificatore del segnale di errore del controller, e quindi dell'SMPS, è determinata dai parametri del circuito di compensazione R4C5. Allo stesso scopo servono i seguenti elementi: il diodo VD2, che elimina i picchi di tensione negativa rispetto al filo comune di alimentazione del microcircuito al declino degli impulsi di commutazione; Diodo Zener VD3. limitare i picchi “bruschi” di tensione positiva sui fronti degli impulsi di commutazione; induttore L2 e resistore limitatore di corrente R7, che impediscono l'autoeccitazione del transistor di commutazione alle alte frequenze. I condensatori ceramici C9 e C10, collegati direttamente ai pin 7 e 8 del microcircuito, aumentano significativamente la stabilità dell'amplificatore. Sul sensore di corrente - resistore R11 - si formano impulsi di tensione a dente di sega per i circuiti di regolazione e protezione, il cui valore di picco dipende dalla corrente di drenaggio del transistor di commutazione. L'ampiezza del segnale diventa pari a 1 V con una corrente di drain di 3,7 A. Ciò garantisce una protezione affidabile del transistor dai danni. Il condensatore di ossido C13 collegato in parallelo al resistore riduce significativamente il rumore di commutazione, prevenendo il falso funzionamento del comparatore di controllo della corrente. Il condensatore C7 ha lo stesso scopo. Il condensatore C6 regola la pendenza della tensione a dente di sega sui pin 3 e 4 del microcircuito, riducendo significativamente le interferenze ad alta frequenza, garantendo anche la necessaria stabilità del controller. Non sono necessarie misure meno efficaci per ridurre l'ampiezza delle interferenze generate nell'SMPS. Un ruolo molto importante in questo è dato allo schermo elettrostatico installato sul trasformatore di impulsi. Forti interferenze vengono emesse anche dal dissipatore di calore su cui è installato il transistor di commutazione, se il dissipatore di calore non è collegato ad un filo comune e il transistor non è isolato da esso con una piastra di mica. Un'interferenza significativa è generata dalle correnti impulsive che circolano nei conduttori collegati al drain del transistor di commutazione e all'avvolgimento di uscita. Per indebolirli, nell'SMPS descritto il transistor è collegato al trasformatore con un breve pezzo di cavo coassiale e il conduttore stampato che collega il diodo raddrizzatore e l'avvolgimento di uscita viene scelto per essere di lunghezza minima e di grande sezione trasversale. È abbastanza ovvio che il contributo significativo alla creazione di interferenze è dato dai processi di commutazione che si verificano quando il transistor viene acceso e spento. La presenza di una capacità interelettrodica drain-source in un transistor ad effetto di campo, nonché di una capacità distribuita e di un'induttanza di dispersione negli avvolgimenti del trasformatore, porta, nel momento in cui il transistor è spento, alla comparsa al suo drain, innanzitutto di un “forte” aumento di tensione significativa e quindi di un segnale ad alta frequenza smorzato in modo esponenziale. La frequenza di riempimento di questo segnale, a meno che non vengano prese misure speciali, è determinata dall'induttanza di dispersione del trasformatore e dalla capacità interelettrodica del transistor. Il circuito di smorzamento VD4R10C12, collegato in parallelo all'avvolgimento di accumulo del trasformatore, sopprime le oscillazioni libere in questo segnale e “lega” il picco di tensione alla fonte di alimentazione di rete. Tipicamente, nei convertitori flyback, un condensatore aggiuntivo con o senza un resistore e un diodo collegati in serie in parallelo è collegato allo drain del transistor di commutazione rispetto al filo comune (sorgente). Questi elementi non solo sopprimono efficacemente i processi di commutazione, ma aiutano anche a ridurre la velocità di aumento della tensione sul drain del transistor nel momento in cui viene spento, prevenendo così la pericolosa dissipazione della potenza istantanea sul transistor e trasferendo la combinazione della massima potenza operativa corrente e tensione operativa massima nell'area delle modalità operative sicure. Nell'SMPS descritto, questa funzione viene eseguita con successo dall'induttore L3. La tensione di uscita raddrizzata viene fornita al carico attraverso un filtro a forma di U, grazie al quale l'ondulazione della tensione di uscita viene ridotta al livello richiesto. Il condensatore C17 collega i circuiti di uscita e ingresso dell'SMPS ad alta frequenza, indebolendo efficacemente le interferenze generate e migliorando significativamente la compatibilità elettromagnetica dell'SMPS con i dispositivi collegati ai circuiti di alimentazione. Un disegno del circuito stampato SMPS è mostrato in Fig. 3. È realizzato in laminato di fibra di vetro su un lato con uno spessore di 1,5 mm e ripete sostanzialmente il design del prototipo [2]. L'eccezione sono le ampie aree di metallizzazione continua lasciate sulla scheda, che aiutano ad aumentare l'immunità al rumore del dispositivo.
Nel dispositivo vengono utilizzate parti ed elementi non difettosi. Condensatore C1 - K73-17 per una tensione nominale di 630 V, C2, C3 - K15-5, C12 e C17 - K78-2 o K15-5 per una tensione nominale di almeno 1000 V. Condensatore all'ossido C4 - K50-32 . È consentito sostituirlo con il K50-35B domestico o con un analogo importato. Per i condensatori C9 e STO - KM-5 - i conduttori vengono accorciati al minimo ottimale e saldati direttamente ai pin 5,7, 8 e 13 del microcircuito dal lato dei conduttori stampati. Condensatore all'ossido C53 - K14-11 o altro tantalio, condensatore C50 - K35-14. I condensatori all'ossido C16 - C50 vengono importati. Puoi usare quelli domestici, ma le loro dimensioni sono leggermente più grandi. Tutti gli altri condensatori sono condensatori ceramici con una tensione nominale di almeno XNUMX V. È possibile sostituire un termistore importato SCK105, dove i primi tre caratteri alfabetici indicano la serie, il quarto e il quinto carattere digitale indicano la resistenza nominale in ohm ad una temperatura di 25 ° C e l'ultima cifra indica la corrente operativa massima in ampere. con uno domestico con parametri simili. Tutti i resistori sono OMLT, ad eccezione del resistore importato R11, che per dimensioni corrisponde approssimativamente all'OMLT-1 domestico. Resistenza trimmer R2 - SPZ-38b. Sostituiremo il ponte raddrizzatore KTs405A (VD1) con diodi separati con una tensione inversa consentita di almeno 400 V e una corrente di almeno 1 A. Diodo D310 (VD2) con una corrente diretta consentita di 0,5 A e una tensione inversa di 20 V possono essere sostituiti con uno moderno con barriera Schottky, la cui caduta di tensione diretta alla corrente massima non supera 0,5 V. Sostituiremo il diodo Zener (VD3) con qualsiasi altro a bassa potenza con una tensione di stabilizzazione di 16. ..18 V. Il diodo a impulsi al posto di VD4 (KD257D) deve essere progettato per una frequenza operativa di almeno 50 kHz, tensione inversa massima 1000 V e corrente massima 3 A. Il diodo KD220B (VD5) sarà sostituito con KD220A o un altro con parametri simili. Il diodo raddrizzatore KD213B (VD6) con una frequenza operativa fino a 100 kHz può sopportare una tensione inversa di 200 V e una corrente massima di 10 A. È consentito collegare diodi simili in parallelo, progettati per una corrente inferiore, senza corrente resistori di equalizzazione. È anche possibile utilizzare diodi moderni. Sostituiremo il transistor KP707V2 con analoghi importati con una tensione drain-source massima di almeno 700 V e una corrente di drain consentita di almeno 4 A. È installato su un dissipatore di calore con un'area di raffreddamento effettiva di 100.. .200 cm2 attraverso una lastra di mica rivestita su entrambi i lati con pasta termoconduttrice KPT-8. Il terminale di drain del transistor dal lato dei conduttori stampati della scheda si collega al trasformatore con un breve spezzone di cavo coassiale del diametro esterno di circa 5 mm, avendo precedentemente fatto passare il nucleo centrale attraverso un tubo di ferrite. Nella fig. La Figura 3 mostra convenzionalmente i punti di inizio e fine per il collegamento dell'induttore L3, ma non viene mostrata l'immagine del segmento di cavo. Per eliminare ulteriori interferenze, la treccia del cavo deve essere collegata al filo comune in punti rigorosamente definiti: da un lato, nelle immediate vicinanze del punto di connessione del diodo VD4 e del terminale 3 del trasformatore, dall'altro, all'estremità punto comune di potenziale zero R11C13. Il tubo di ferrite è incollato tramite una guarnizione isolante alla scheda dal lato dei conduttori stampati sotto gli elementi R11, C13. È consentito sostituire l'induttanza industriale del filtro di linea L1 con una fatta in casa. È avvolto in due conduttori MGTF 0,35 su un radioregistratore ad anello di ferrite 1500NM-2000NM con un diametro esterno di circa 20 mm fino al riempimento. Le induttanze L2 e L3 sono sezioni di tubi lunghi rispettivamente 5...7 e 10...12 mm, realizzati in ferrite ad alta frequenza, utilizzati nelle induttanze DM-1,0, ecc. Per ottenere i valori di induttanza indicati nella tabella diagramma, per l'induttore L2 ne avrai bisogno di un giro di filo PEVT è 0,41 e per L3 - due giri. Nella versione dell'autore venivano utilizzati prodotti importati simili e per ciascun induttore era richiesto un giro (attraverso il passaggio). Lo strozzatore L4 è avvolto su un pezzo di asta di diametro 10 e lunghezza 35...40 mm realizzato in ferrite 400NN. Il suo avvolgimento contiene 30 spire di filo PEV-2 1,5. Il nucleo magnetico del trasformatore T1 è assemblato da due metà Ø12x20x21 di ferrite M3000NMS2, utilizzata negli alimentatori televisivi per televisori 3(4)USCT, ecc., con uno spazio non magnetico sull'asta centrale di 2,4 mm. Gli avvolgimenti sono avvolti su un telaio standard con terminali di contatto, la cui numerazione corrisponde a quella mostrata nello schema. Vengono eseguiti come segue. Innanzitutto, viene avvolta la prima sezione dell'avvolgimento primario: 26 giri di PEVT 0,41 in due fili. È coibentato con due strati di tessuto verniciato di spessore 0,05 mm. Un avvolgimento di uscita di 25 giri di filo PEV-2 1,5 è avvolto sull'isolamento. In questo caso si rimuovono i terminali 10, 12 e 14 esistenti sul telaio e si utilizza come terminale il filo dell'avvolgimento, facendolo passare nelle asole tra i terminali 10 e 12, 12 e 14 rispettivamente. Nello schema i numeri dei terminali sono convenzionalmente indicati con 10a e 12a. Successivamente vengono stesi due strati di isolante e sopra viene avvolta una seconda sezione dell'avvolgimento primario contenente 44 spire. Infine, l'avvolgimento di comunicazione ausiliario viene avvolto da 12 spire di filo PEVT con un diametro di 0,15...0,21 mm, distribuendolo uniformemente su tutta la larghezza del telaio e coprendolo sopra con un altro strato di isolamento. Dopo aver incollato le piastre di ferrite del trasformatore, gli avvolgimenti insieme al nucleo magnetico vengono ricoperti da uno schermo elettrostatico costituito da uno strato di lamina di rame. Il numero di spire negli avvolgimenti è determinato dal nucleo magnetico e dal traferro non magnetico, quindi dovrebbero essere ricalcolati per un altro nucleo magnetico. L'SMPS è collegato alla rete con un cavo a due fili, nell'intervallo del quale è collegato un interruttore PKn41 o un interruttore a levetta TV2-1, nonché un fusibile da 2 A. Se durante la fabbricazione del trasformatore la fase degli avvolgimenti non viene disturbata e vengono utilizzate parti riparabili, l'impostazione del dispositivo si riduce all'impostazione della tensione di uscita con il resistore di regolazione R2. L'uso di elementi del circuito di impostazione della frequenza R5C8 senza la loro selezione preliminare può portare ad una leggera deviazione della frequenza operativa dal valore calcolato. Il tipo e le classificazioni della maggior parte degli elementi utilizzati nell'SMPS sono stati determinati in conformità con i risultati della progettazione assistita da computer, che verranno discussi ulteriormente. CARATTERISTICHE DI PROGETTAZIONE DI SMPS REVERSE Forse l'IIP descritto soddisferà completamente alcuni radioamatori e deciderà di ripeterlo senza cambiare nulla. Ma la probabilità che un simile evento si verifichi è molto, molto piccola: a seconda della portata degli interessi dei radioamatori, che sono sempre sfaccettati, potrebbe essere necessaria una fonte i cui parametri differiranno significativamente da quelli indicati. Pertanto, nella maggior parte dei casi pratici, sarà necessaria la modifica del dispositivo descritto e alcune modifiche. Il gruppo di società STMicroelectronics che produce componenti radioelettronici ha sviluppato e vende una linea di microcircuiti con il nome commerciale VIPer sul mercato globale, compreso quello russo. Senza entrare nei dettagli dell'abbreviazione utilizzata, notiamo solo che questo prodotto è una versione integrata del frammento principale dell'SMPS, comprendente un transistor di commutazione e un controller PWM. Secondo gli sviluppatori, tali microcircuiti dovrebbero facilitare in modo significativo il lavoro dei progettisti e degli operatori di SMPS. Un certo aumento (2...4 volte - a seconda del microcircuito selezionato) del costo dell'elemento base dell'SMPS con commutazione VIPer, rispetto al suo design discreto, è completamente compensato anche dalle possibilità di progettazione assistita da computer come rapido ripristino della funzionalità mediante la semplice sostituzione del microcircuito in caso di malfunzionamento. Per la progettazione automatizzata di SMPS basati su microcircuiti VIPer, la stessa azienda ha sviluppato un pacchetto software distribuito gratuitamente VIPer Design Software. L'ultima versione del programma (v2.12) con una capacità di 4 MB può essere scaricata dal sito Web dello sviluppatore . Questo pacchetto software, di seguito denominato DS (Design Software), può essere utilizzato con successo per progettare la versione descritta dell'SMPS basata sul controller PWM UC3842. Un'interfaccia intuitiva ti consente di completare un'attività così complessa in pochi minuti. Prima di utilizzare DS, chiariremo alcune caratteristiche di progettazione relative alla selezione degli elementi e all'impostazione della frequenza operativa di conversione nell'SMPS. Va ricordato che nei trasformatori flyback pulsati il circuito magnetico è sempre realizzato con un traferro non magnetico sull'asta centrale (nucleo). Stiamo parlando di trasformatori con piastre a forma di W, nonché di moderni nuclei magnetici KB (analogo straniero di RM) [5, 6]. Prestiamo attenzione anche alla preferenza per l'utilizzo della ferrite per i trasformatori di impulsi, ad esempio il marchio M3000NMS-2, il cui nome contiene il simbolo C. Questo è un segno della capacità di un filo magnetico realizzato con questo materiale di funzionare in forti campi magnetici, dovuti, a differenza degli altri, al coefficiente di temperatura negativo delle perdite specifiche. Nonostante la diminuzione dell'efficienza e il deterioramento della compatibilità elettromagnetica del trasformatore con altri elementi, il traferro non magnetico non può essere abbandonato. In primo luogo, in forti campi magnetici, il divario impedisce la saturazione del circuito magnetico e, in secondo luogo, con la corretta scelta della modalità operativa del transistor di commutazione, la presenza del divario impedisce un aumento eccessivo del valore di ampiezza degli impulsi di corrente in il suo circuito di scarico. Pertanto dobbiamo sopportare le perdite e tenere conto del fatto che l'intensità della radiazione di disturbo associata alle armoniche fondamentali e superiori della frequenza di conversione operativa aumenta in modo relativamente rapido dopo 100 kHz. Naturalmente, ci sono materiali magnetici in cui i domini sono separati gli uni dagli altri da una sostanza non magnetica (ad esempio, da un magnetodielettrico a base di permalloy di molibdeno dei gradi MP-60, MP-140, MP-160, MP-250, ecc.), in essi è presente una fessura, come se fosse distribuita su tutto il volume di lavoro del nucleo magnetico e quindi, in linea di principio, è possibile utilizzare nuclei magnetici solidi senza fessura. La seconda fonte di perdite nell'SMPS è la crescente resistenza dei conduttori dell'avvolgimento dovuta alla diminuzione della profondità di penetrazione del campo a frequenze più elevate. Pertanto, per ridurre le perdite causate da questo fenomeno, è consigliabile realizzare l'avvolgimento da più conduttori paralleli, la cui sezione trasversale è equivalente a quella originale, ma la superficie laterale lungo il perimetro della sezione trasversale dei conduttori è parecchie volte più grande. Più precisamente l'aumento della superficie laterale in questo caso è proporzionale alla radice quadrata del numero di conduttori paralleli. La terza fonte di perdite è associata all'inversione della magnetizzazione del circuito magnetico. E infine, l'ultima, quarta fonte di perdite è dovuta alla necessità di utilizzare vari circuiti di condensatori resistivi che sopprimono i processi di commutazione transitoria e alla velocità limitata dei radioelementi utilizzati negli SMPS: condensatori all'ossido, transistor ad effetto di campo, diodi raddrizzatori . La tensione non sinusoidale (a impulsi) su questi elementi e la grande ampiezza di corrente (fino a diversi ampere) portano ad una quota significativa di perdite in essi. Tutte queste perdite devono essere prese in considerazione quando si progetta un SMPS utilizzando DS. Poiché le perdite in un trasformatore portano al riscaldamento degli avvolgimenti e del nucleo magnetico, per valutarle viene utilizzato uno dei criteri: o l'aumento di temperatura consentito del trasformatore senza il suo raffreddamento forzato, che di solito viene scelto entro un intervallo di 30... 50 °C, ovvero il peso specifico delle perdite è considerato pari all'1...5% della potenza del trasformatore. La prestazione complessiva dell’SMPS è valutata sulla base dell’efficienza. Nel migliore dei casi il suo valore può raggiungere il 92...95%, nel peggiore il 60...65%. SELEZIONE DEL TRANSISTOR DI COMMUTAZIONE E DIODI RADDRIZZATORI Il transistor di commutazione può essere selezionato senza calcoli con un margine multiplo. Ma questo problema può essere risolto in modo più razionale. Come determinare i parametri che il transistor di commutazione deve rispettare, a seconda delle caratteristiche tecniche dell'SMPS progettato? Sfortunatamente il pacchetto DS non risponde direttamente alla domanda posta. Pertanto, consideriamo innanzitutto la forma della tensione impulsiva allo scarico del transistor Uc (Fig. 4).
Secondo i dati iniziali, con una tensione di rete nominale di 220 V all'uscita del raddrizzatore di rete, senza tener conto della caduta di tensione sui diodi raddrizzatori e sul termistore, otteniamo [7] U0 = 220√2 =310 V. Inoltre al drain del transistor è presente una tensione aggiuntiva Uaddizionata alla tensione di rete raddrizzata. Nella letteratura straniera e nei DS si chiama UR (riflesso – riflesso, indotto). Come mostrano i risultati della progettazione di prova di diverse varianti di trasformatori di impulsi, il suo valore risulta sempre molto vicino agli 80 V predefiniti proposti in DS. Mostreremo come determinare il valore reale della tensione aggiuntiva. La tensione ai capi dell'induttanza è direttamente proporzionale alla velocità di variazione della corrente al suo interno: U = LΔI/Δt o U·Δt = L·ΔI. Poiché le variazioni di corrente quando il transistor viene acceso e spento sono le stesse per un processo stazionario, le aree dei rettangoli designate S+ e S- in Fig. 4. Calcolando le loro aree, otteniamo l'equazione Uo·D·T = Uadd(1-D)T oppure dopo trasformazioni Uadd = Uo·D /(1-D). D'altra parte, secondo l'interpretazione geometrica del processo di trasferimento di energia, la tensione di uscita sull'avvolgimento secondario è la tensione aggiuntiva trasformata sull'avvolgimento primario: Uadd = k·Uout, dove k = wl/wout è il coefficiente di trasformazione (wl, wout è il numero di spire rispettivamente dell'avvolgimento primario e di quello di uscita). A rigor di termini, presupponendo che ciascuna porzione di energia prelevata dalla rete nel primo ciclo venga completamente trasferita al carico nel secondo ciclo, come mostrato in Fig. 4 come una linea continua e la trasmissione termina esattamente nel momento in cui il transistor viene acceso, è in una certa misura condizionato. In realtà, l'SMPS può funzionare in due modalità: modalità a flusso magnetico continuo e modalità a flusso intermittente. In pratica, ciò significa che se al momento dell'accensione del transistor di commutazione la corrente negli avvolgimenti è pari a zero, questa modalità corrisponde alla modalità di flusso intermittente. Altrimenti si verifica un regime di flusso continuo. Nella fig. La Figura 5 mostra i diagrammi di tensione e corrente negli elementi SMPS: Uc - tensione al drain del transistor; lc - corrente di drenaggio del transistor di commutazione; lw out - corrente nell'avvolgimento secondario; UH è la tensione sul carico.
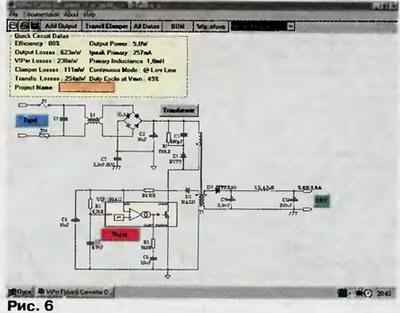
La modalità corrente continua corrisponde alla Fig. 5, a. La sua caratteristica principale è che il transistor si accende ad una certa corrente di drain. Il vantaggio di questa modalità è la corrente di picco più bassa negli elementi SMPS rispetto ad altre modalità e l'ondulazione della tensione di uscita più bassa. Se, riducendo la tensione di rete al minimo, il duty cycle dovesse aumentare oltre il 50%, DS avverte l'utente che è necessario apportare modifiche ai calcoli. Ciò è dovuto alle peculiarità della magnetizzazione del circuito magnetico in modalità impulso a ciclo singolo e alla possibilità di aumentare l'ampiezza della corrente di drain del transistor al di sopra del limite consentito. La modalità corrente intermittente è mostrata in Fig. 5, c. Una volta completato il processo di trasferimento di energia, il diodo si chiude. Negli avvolgimenti, quando la tensione impulsiva diminuisce, si verificano oscillazioni libere smorzate. Questa modalità è caratterizzata dalla massima ampiezza di corrente negli elementi SMPS e dalla massima ondulazione della tensione di uscita. La modalità ottimale è la transizione tra le due modalità denominate, mostrata in Fig. 5B. Il programma DS consente di controllare l'ampiezza, la forma della corrente e della tensione sul transistor, nonché di determinare la modalità operativa dell'SMPS progettato e il valore del ciclo di lavoro dell'impulso con qualsiasi tensione di rete possibile. Un'aggiunta significativa alla tensione che agisce sul drain del transistor è data dall'induttanza di dispersione (in DS è denominata induttanza di dispersione). È direttamente correlato ai campi dispersi nel trasformatore. Durante l'azione degli impulsi di commutazione, quando il transistor è aperto, l'energia viene accumulata non solo nell'avvolgimento di accumulo, ma anche nell'induttanza di dispersione. Quando il transistor è spento, questa energia porta alla comparsa di un ulteriore picco di tensione al suo drain, mostrato in Fig. 4 linea tratteggiata. Per limitarlo vengono utilizzate catene di ammortizzatori. Nel programma DS è possibile selezionare un circuito resistore-condensatore (RC Clamper) o un diodo zener limitatore (Transil Clamper). Il calcolo dell'induttanza di dispersione e del relativo picco di tensione è un compito molto complesso, poiché è necessario tenere conto dell'induttanza e della capacità dinamica tra le spire degli avvolgimenti, del traferro non magnetico nel nucleo magnetico del trasformatore, del sezionamento degli avvolgimenti, dei parametri di progettazione del loro design e molti altri fattori. Il programma DS utilizza un determinato valore medio di induttanza di dispersione, che l'utente può modificare forzatamente se necessario. Il livello di limitazione dei picchi di tensione in ciascun caso specifico di progettazione SMPS può essere monitorato nella finestra Forma d'onda (oscillogramma) e preso in considerazione quando si sceglie un transistor in base alla massima tensione drain-source consentita. Selezionare un diodo raddrizzatore in un DS è semplice. La finestra OUT (uscita) fornisce le informazioni necessarie sui suoi parametri: corrente diretta e inversa, caduta diretta e tensione inversa massima consentita. PROGETTAZIONE AUTOMATICA DI SMPS REVERSE Quindi, accendi il computer e avvia il programma DS. Sullo schermo del monitor viene visualizzata per alcuni secondi una schermata iniziale, quindi si apre una finestra (Fig. 6). Per impostazione predefinita, il programma carica un progetto "vuoto" con il nome "Default.vpa".
Spostiamo il cursore del mouse sul pulsante Ingresso blu sullo schermo e sullo schermo del monitor viene visualizzata una descrizione comando: Modifica dei parametri della linea CA (modifica dei parametri della rete CA). Premiamo il pulsante. Sullo schermo del monitor viene visualizzata la finestra Parametri di input, mostrata in Fig. 7.
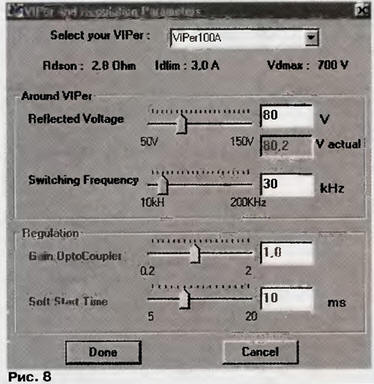
Nella sezione Line Frequency (frequenza di rete) impostiamo 50 Hz, nella sezione AC Input Range (intervallo di tensione alternata in ingresso) utilizzando lo slider, oppure dopo aver posizionato il cursore nell'apposita finestra - digitando da tastiera - impostiamo Tensione Minima (tensione minima) e Tensione massima (tensione massima), la prima con una precisione di 5 V, la seconda -10 V. È possibile impostare qualsiasi tensione dalla tastiera con una precisione di 1 V. Per la maggior parte dei dispositivi, la la variazione consentita della tensione di rete è considerata -10...+5% del valore nominale o dopo l'arrotondamento verso l'aumento dell'intervallo - 195...240 V. È possibile impostare l'intervallo un po' più ampio, ma in ogni caso si non dovrebbe lasciarlo impostato per impostazione predefinita, poiché più è grande, più rigorosi sono i requisiti per l'elemento base utilizzato. Quindi nella stessa finestra andiamo alla sezione Input Ripple (ampiezza dell'ondulazione della tensione di ingresso) e impostiamo il valore richiesto. La capacità del condensatore del filtro raddrizzatore di rete e l'ampiezza dell'ondulazione della tensione di uscita dipenderanno da questo parametro, che a sua volta dipende anche dalla corrente di carico e dalla capacità del condensatore del filtro di uscita. Il valore di ondulazione accettabile è 10...30 V. Impostare 30 V e fare clic sul pulsante Fatto - fatto (è possibile utilizzare il pulsante Annulla per annullare le modifiche apportate, se necessario). La finestra Parametri di ingresso si chiuderà automaticamente e il sistema effettuerà alcune modifiche: ad esempio, cambierà la capacità del condensatore del filtro del raddrizzatore di rete. Nella fase di progettazione successiva, procediamo all'impostazione della frequenza di conversione operativa e alla selezione preliminare del transistor di commutazione, per il quale premiamo il pulsante VIPer. Nella finestra VIPer e Parametri di Regolazione che appare (Fig. 8), nella finestra Seleziona il tuo VIPer, richiama l'elenco a tendina dei prodotti e seleziona VIPer 100A. Ora, subito sotto il suo nome, verranno visualizzati i parametri principali: Rdson: 2,8 Ohm (resistenza della sezione drain-source quando accesa); Idlim: 3,0 A (limite corrente di scarico); Vdmax: 700 V (tensione di drain massima). Nella sezione Around VIPer, il valore della tensione riflessa viene lasciato impostato dal sistema e la frequenza di commutazione è impostata su 30 kHz. Ciò ridurrà le perdite e farà a meno delle parti scarse, anche se per ridurre al minimo le dimensioni del trasformatore è meglio utilizzare una frequenza più alta, fino a 100 kHz. La sezione Regolamento rimane inattiva e non può essere modificata. Questo può essere fatto solo dopo aver introdotto un circuito di controllo secondario. Fare clic sul pulsante Fine. La finestra si chiuderà automaticamente.
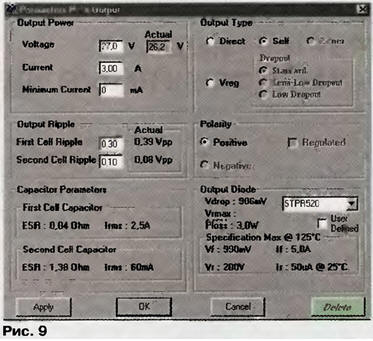
Successivamente, vai al pulsante verde Out. Nella finestra Parametri Main Output che si apre (parametri della sorgente di tensione di uscita principale) (Fig. 9), procedere alla modifica della sezione Potenza di Uscita: nella finestra Tensione, impostare 27 V; nella finestra Corrente componiamo 3 A; nella finestra Corrente Minima lasciamo il programma impostato a 0 mA, che presuppone la possibilità di operare in modalità inattiva.
Successivamente, modifica la sezione Tipo di output (filtro di output). È possibile lasciare installato il filtro LC Self a forma di U predefinito. Se si seleziona Diretto (un filtro è un condensatore collegato in parallelo al carico), potrebbe essere necessario un condensatore molto grande. Selezionando Vreg (regolatore di tensione), all'uscita verrà installato un ulteriore regolatore di tensione lineare integrato. In questo caso è necessario specificare il valore Dropout (caduta di tensione attraverso lo stabilizzatore). È possibile scegliere tra Standard (standard), Low Dropout (basso) e Semi-Low Dropout (medio). Lasciare il filtro di output su Self. Passiamo alla modifica del valore di ripple della tensione di uscita - la sezione Ripple di uscita: nella finestra First Cell Ripple (ripple nel primo stadio) impostare 0,3 V, Second Cell Ripple (ripple nel secondo stadio) - 0,1 V. Dopo tutto il sopra le manipolazioni, fare clic sul pulsante Applica. Il programma calcolerà immediatamente i parametri degli elementi del circuito di uscita e presenterà i risultati del calcolo per il diodo raddrizzatore: Vdrop: 906 mV - caduta di tensione diretta, Vrmax: 150 V - tensione inversa massima (purtroppo esiste un difetto di rendering del software in quel momento di scrittura permette di vedere solo la parte superiore dei pixel dell'elemento specificato), Ploss: 3 W - perdite sul diodo; Specifica Max@125 °C - parametri del diodo STPR520 alla temperatura specificata: Vf: 990 mV - caduta di tensione diretta, Se: 5 A - corrente diretta consentita, Vr: 200 V - tensione inversa massima; Ir: 50 uA a 25 °C - corrente inversa massima alla temperatura specificata. Utilizzando il libro di consultazione, selezioniamo uno stretto analogo domestico di KD213B. Va notato che a causa della forma della tensione impulsiva, che è molto diversa dal meandro, il diodo raddrizzatore, partecipando alla formazione di una tensione relativamente bassa di 27 V, sperimenta una tensione inversa significativamente più elevata - circa 150 V - e tenere conto di questo fatto quando si scelgono i diodi. Dopo aver completato questa fase di progettazione, fare clic sul pulsante OK della finestra di output principale dei parametri aperta, dopodiché si chiude. E l'ultima fase di progettazione è associata alla modifica dei parametri del trasformatore di impulsi. Fare clic sul pulsante grigio Transformer, dopodiché si aprirà la finestra Transformer Design, mostrata in Fig. 10.
La finestra è composta da due sezioni principali: Parametri Trasformatore e Outlook Trasformatore, il cui contenuto corrisponde al trasformatore la cui taglia è indicata nella sezione Core Size. Il programma utilizza la dimensione minima consentita del nucleo magnetico, in conformità con il criterio di valutazione della perdita predefinito Aumento della temperatura nella sezione Criteri di selezione del nucleo. Di fronte a questo criterio c'è una casella di controllo, in una riga con cui sono indicati i suoi valori: Target 40°С (ammissibile) e Actual 34,8°С (effettivo). In questo caso i valori del criterio minore Potenza dissipata corrispondono a Target 2%, Actual 2,2%. Quest'ultimo, in quanto eccedente la norma stabilita, viene visualizzato nella finestra su sfondo rosso. Se selezioni il secondo criterio come principale (sposta la casella di controllo accanto al suo nome), quindi fai clic sul pulsante Applica, i parametri del trasformatore cambieranno immediatamente Nella finestra Geometria della sezione Dimensioni del nucleo, le dimensioni di ciascuna piastra sono mostrate nel seguente ordine: larghezza/altezza/spessore E36/18/11 serie E (geometria per la serie E - un analogo estraneo delle piastre a forma di W) . L'analogo domestico W 10x10 ha quasi le stesse dimensioni. Se lo usi, puoi passare alla sezione successiva. Se tale nucleo magnetico non è disponibile, ma è disponibile Ø12x20x21 in ferrite M3000NMS2, utilizzato negli alimentatori per televisori 3(4) USCT e altri, è necessario ricalcolare i parametri del trasformatore. Per fare ciò, nella sezione Core Size, seleziona la casella nella finestra Fixed e fai clic sul pulsante Modifica, dopodiché verrà visualizzata la finestra Core Size (Fig. 11).
Lasciamo invariata la forma del nucleo magnetico della serie E (se necessario, nella stessa finestra è possibile selezionare un altro nucleo magnetico dall'elenco fornito, ad esempio la serie RM10). Successivamente, nella finestra Geometria, seleziona una dimensione standard vicina all'attuale E42/21/20. Fare clic sul pulsante OK, dopodiché la finestra Core Size si chiuderà. Ora nella sezione Core Size è possibile leggere i parametri del nucleo magnetico selezionato: Ae 236 mm2 (area della sezione); Le 98 mm (lunghezza media della linea magnetica); Lm 85 mm (lunghezza media bobina); L 200 mm2 (sezione della finestra); Ve 23100 mm3 (volume del nucleo magnetico). Nota: dopo aver aumentato le dimensioni, il banner rosso corrispondente al criterio non principale Potenza dissipata è scomparso - in precedenza il suo valore effettivo del 2,2% superava quello richiesto, ma ora è tornato alla normalità ed è pari all'1,4%. Passiamo ai contenuti della sezione Core Material (materiale del nucleo magnetico). Per impostazione predefinita, il programma offre: Tipo N27, Fornitore SIEMENS (marchio di ferrite N27 di SIEMENS). Confrontando i suoi parametri con le caratteristiche delle ferriti domestiche M3000NMS2 riportate nel libro di consultazione [8], notiamo il loro buon accordo. Se è necessario utilizzare un'altra ferrite, è necessario selezionare la casella nella finestra Definito dall'utente e fare clic sul pulsante Modifica, dopodiché verrà visualizzata la finestra Materiale del nucleo del trasformatore, mostrata in Fig. 12.
Ti consente di selezionare il produttore e la marca della ferrite, i cui parametri sono visualizzati nella stessa finestra. È importante notare che, indipendentemente dalla ferrite scelta, il valore del parametro Induttanza primaria (vedere Fig. 10) rimane invariato. Passiamo alla sezione Transformer Outlook (parametri di uscita del trasformatore), che fornisce informazioni sugli avvolgimenti del trasformatore. Ora puoi riscriverli (o stamparli su una stampante, esiste un'opzione del genere) e iniziare l'implementazione pratica. Alcuni errori di calcolo, come qualsiasi altro fattore destabilizzante, verranno livellati dalle unità di controllo automatico del controller PWM, ma ciò ridurrà il margine di stabilità dell'SMPS per altre influenze di disturbo. Pertanto, è ancora meglio prendersi il tempo necessario e adattare i risultati della progettazione assistita dal computer, avvicinandoli il più possibile a quelli reali. CORREZIONE DEI RISULTATI DI PROGETTAZIONE Torniamo nuovamente alla finestra Transformer Design, mostrata in fig. dieci. Nella sezione Selezione Filo Conduttori Paralleli lasceremo il checkbox predefinito del programma sulla voce Filo Singolo, che corrisponderà all'utilizzo di conduttori singoli nell'avvolgimento. Se si seleziona la voce //Fili (conduttori paralleli) e nella finestra corrispondente si correggono i 10 conduttori installati dal sistema ad un numero stimato diverso, a seconda della frequenza di funzionamento, il programma ricalcolerà gli avvolgimenti del trasformatore con nuovi valori iniziali. È possibile utilizzare conduttori dello stesso diametro per tutti gli avvolgimenti. Per fare ciò, basta selezionare la casella nella finestra Diametro singolo e premere il pulsante Applica. Ci limiteremo all'utilizzo di singoli conduttori di vario diametro. Ora nella sezione Transformer Outlook puoi leggere le informazioni di riferimento su tutti gli avvolgimenti: Ingresso AWG20 75T 1W (primario - filo n. 20 secondo lo standard AWG, 75 spire di filo singolo), Ausiliario AWG42 13T 1W (ausiliario - filo n. 42 , 13 giri), Out AWG 13 26T 1W (uscita - filo n. 13, 26 giri). Per conoscere il diametro del filo in millimetri, vai nella sezione Dettagli AWG e clicca su uno dei tre pulsanti colorati, il cui colore corrisponde al colore degli avvolgimenti. Il nome corrispondente dell'avvolgimento appare nell'intestazione Dettagli AWG e i suoi parametri geometrici ed elettrici appaiono di seguito. Ad esempio per avvolgimento ausiliario (Aux) Ø64 um Iso 76 um; Rdc=6,9 R; Rac = 6,9 R (diametro - 64 µm = 0,064 mm, con isolamento - 0,076 mm; resistenza CC - 6,9 Ohm; resistenza CA - 6,9 Ohm). La sezione Utilizzo del trasformatore fornisce gli standard di base che caratterizzano alcune delle riserve che devono essere fornite durante la progettazione di un trasformatore. Questi includono Window Factor Utilization (fattore di riempimento della sezione trasversale della finestra), che per impostazione predefinita non deve superare l'80%, e Bsat Margin (margine per la massima induzione nel circuito magnetico) relativo all'induzione in modalità saturazione Bsat 380 mT - niente meno superiore al 25%. Il valore calcolato dell'induzione magnetica di Flux Density 116 mT è solo circa il 30% del massimo possibile, ovvero il margine è del 70%, e il margine richiesto è soddisfatto. Un'induzione magnetica così bassa è dovuta all'Air Gap non magnetico qui indicato, pari a 2,28 mm. In conformità con l'algoritmo di progettazione, il programma ha calcolato che l'induttanza dell'avvolgimento primario dovrebbe essere 0,73 mH. Ma se si adotta un approccio critico ai risultati del progetto, è necessario tenere conto in anticipo dell'errore nei calcoli. I libri di consultazione sui prodotti in ferrite indicano che i loro parametri elettromagnetici possono differire dai valori indicati del ±25%. Pertanto, è meglio non fare affidamento sul caso e non sovraccaricare il complesso di fattori destabilizzanti con ulteriori influenze di disturbo, ma correggere i risultati della progettazione. Ciò riguarda innanzitutto l'induttanza dell'avvolgimento primario del trasformatore. Poiché durante lo sviluppo di un SMPS, un radioamatore può avere a sua disposizione un circuito magnetico con un gap non magnetico diverso da quello calcolato. Questa circostanza indica anche la necessità di tenere conto della reale induttanza dell'avvolgimento primario. Le formule matematiche note non consentono di calcolare l'induttanza dell'avvolgimento primario con elevata precisione, poiché non tengono conto della forte influenza del traferro non magnetico sull'effettiva permeabilità magnetica del materiale del nucleo magnetico. Pertanto, il modo più semplice è avvolgere un avvolgimento di prova con il numero di spire wtest su un circuito magnetico esistente. misurare la sua induttanza Lprobe, quindi calcolare il numero di spire w richieste per una data induttanza L: w = wprobe√ Campioni L/L. È ovvio che l'induttanza dell'avvolgimento dipende ben poco dal diametro del conduttore. Può succedere che il radioamatore non abbia a sua disposizione l'assortimento di fili di avvolgimento richiesti dal sistema, ma esista un insieme di fili di diverso diametro che possono essere utilizzati per realizzare un trasformatore. Ad esempio, per l'avvolgimento primario il programma consiglia di utilizzare un filo con un diametro di 0,812 mm. Inoltre, a una frequenza di conversione di 30 kHz, non sarà possibile “forzare” il programma a passare ai conduttori paralleli. Tuttavia, nella maggior parte dei trasformatori di impulsi per alimentatori televisivi, gli avvolgimenti sono costituiti da più conduttori paralleli. Eseguiamo questa operazione al di fuori del sistema di progettazione assistita dal computer. Dalla condizione di uguaglianza della superficie laterale, uguagliando la circonferenza dei conduttori singoli e paralleli, determiniamo il loro diametro: d2 = d1/2 -0,41 mm. L'induttanza dell'avvolgimento primario del trasformatore, contenente 26 spire di due conduttori PEV-2 0,41, avvolti su un nucleo magnetico da piastre del trasformatore Ш12x20x21 con uno spazio non magnetico sull'asta centrale di 2,4 mm, si è rivelata pari a 103μH. Per ottenere l'induttanza richiesta di 730 µH, l'avvolgimento deve essere formato da circa 70 spire. Regoliamo proporzionalmente i rimanenti avvolgimenti consigliati dal programma: w2 = (70/75)·13 -12 giri; wvyx = (70/75) 26 - 24 giri. L'induttanza effettiva dell'avvolgimento primario di un trasformatore realizzato secondo i parametri indicati è pari a circa 770 μH, il che concorda bene con il calcolo. Per l'avvolgimento di uscita, il programma consiglia di utilizzare un filo con un diametro di 1,8 mm e la resistenza dell'avvolgimento per la corrente continua sarà di 25 mOhm e per la corrente alternata - 38 mOhm. Sfortunatamente, l'autore non aveva a sua disposizione il filo necessario, quindi ha dovuto sostituirlo con uno esistente di diametro diverso - 1,5 mm. L'inevitabile aumento della resistenza dell'avvolgimento e la corrispondente diminuzione della tensione di uscita dovranno essere compensati aumentando il numero di spire di 25. Un margine significativo dell'aumento di temperatura calcolato del trasformatore (15,5 ° C contro i 40 ° C consentiti) dà la diritto di sperare nella validità di tale aggiustamento. Completando il calcolo del trasformatore, determiniamo la tensione aggiuntiva Uadd = (70/25) 27 = 75,6 V, e tenendo conto del rendimento - 81,6 V, che è molto vicino a quello impostato dal programma, e quindi al VIPer finestra (vedi Fig. 8 ) non è necessario tornare indietro. Passiamo alla scelta di un transistor di commutazione. Sulla barra degli strumenti del DS cliccare sul pulsante Waveform (oscillogramma), dopodiché verrà visualizzata la finestra mostrata in Fig. 13, in cui si possono osservare a scelta fino a quattro diversi parametri SMPS contemporaneamente.
Lasciamo le due finestre offerte dal sistema per la visualizzazione degli oscillogrammi, e nella prima finestra visualizziamo la dipendenza Idrain = f(Vin)@Pmax (dipendenza della corrente di drain dalla tensione di ingresso al massimo consumo di potenza), e nella seconda - Vdrain = f(Vin)@Pmax (dipendenza della tensione di drain dalla tensione di ingresso al massimo consumo di potenza). Modificando la tensione di ingresso utilizzando lo slider sulla barra di scorrimento, è possibile esplorare la natura della trasformazione dei parametri specificati. Da questi diagrammi possiamo trarre le seguenti conclusioni: con tutte le modifiche consentite nella tensione di rete e nei parametri di carico, l'SMPS progettato funziona in modalità corrente intermittente - ciò è inoltre evidenziato dall'iscrizione nell'angolo in alto a destra delle finestre con oscillogrammi; l'ampiezza della corrente di drain del transistor di commutazione alla massima tensione di rete è 2,7 A; alla tensione minima l'ampiezza della corrente rimane la stessa e il duty cycle degli impulsi di commutazione aumenta da 0,18 a 0,24; la tensione massima al drain del transistor (alla massima tensione di rete) raggiunge 640 V. I risultati ottenuti ci consentono di concludere che per l'SMPS progettato è consentito utilizzare un transistor ad effetto di campo KP707V2 o un altro, la cui corrente di drain massima è 4 A e la tensione drain-source massima è di 700 V. Per ottenere i risultati della progettazione assistita da computer di SMPS è sufficiente cliccare sul pulsante BOM (Distinta Materiali - elenco elementi) sulla barra degli strumenti DS (vedi Fig. 6), dopodiché verrà visualizzata la finestra Elenco BOM appaiono (Fig. 14). Se è necessario stampare l'elenco degli elementi, fare clic sul pulsante Stampa.
Ricordiamo che il calcolo è stato effettuato per un SMPS commutabile VIPer, ma in realtà è assemblato sulla base di un controller PWM UC3842. Nonostante tutte le loro somiglianze e somiglianze, c'è ancora una differenza significativa che in ogni caso non può essere ignorata. Ciò è dovuto al fatto che nel primo caso il resistore di impostazione della frequenza è collegato direttamente all'alimentazione del microcircuito +15 V e nel secondo alla fonte interna di tensione stabilizzata +5 V. Pertanto, in Per garantire la frequenza richiesta degli impulsi di commutazione f = 30 kHz con un ciclo di lavoro di valore medio D = (0,18 + 0,24)/2 = 0,21, è necessario regolare i valori del circuito RC di impostazione della frequenza. La frequenza dell'oscillatore nel chip UC3842 è determinata in base alle prestazioni del circuito RC dal rapporto f-1,72/RC. Il tempo tOFF, durante il quale il transistor di commutazione rimane spento (vedi Fig. 1), è correlato al periodo dell'impulso T e al duty cycle D mediante l'uguaglianza tOFF = T(1-D). D'altro canto questo tempo è determinato anche dai parametri del circuito RC: tOFF = RCIn[(0,00063R-2,7)/(0,00063R-4)]. Sostituendo queste formule e potenziando poi l'ultima uguaglianza, otteniamo l'equazione R = {2,7-4exp[(1-D)/1,72]}/ /{0,00063[1-exp[(1-D)/1,72 ,XNUMX]] }. In base al ciclo di lavoro medio richiesto D = 0,21, otteniamo R = 9,889 kOhm e C = 5798 pF. Forse un'accensione di prova degli SMPS mostrerà che hanno bisogno di qualche aggiustamento. Per eliminare una deviazione significativa nella frequenza e nel ciclo di lavoro degli impulsi di commutazione da quelli calcolati, consiglio di utilizzare un dispositivo di misurazione digitale per selezionare un resistore e un condensatore con i valori richiesti. Il dispositivo sviluppato può essere migliorato, ad esempio, aggiungendo la sincronizzazione della frequenza operativa del controller PWM con una sorgente di tensione a impulsi esterna, lo spegnimento remoto dell'SMPS, un circuito di controllo della tensione di uscita secondaria e un avvio "soft", utilizzando molibdeno-permalloy , così come i moderni nuclei magnetici GAMMAMET [9]. Letteratura
Autore: S. Kosenko, Voronezh
Macchina per diradare i fiori nei giardini
02.05.2024 Microscopio infrarosso avanzato
02.05.2024 Trappola d'aria per insetti
01.05.2024
▪ Controlla la luminosità senza un cursore ▪ Tastiera meccanica Hexgears Hyeku F2 ▪ Materiale che ripristina il tessuto nervoso con impulsi elettrici
▪ sezione del sito Regolatori di corrente, tensione, potenza. Selezione di articoli ▪ Articolo di Pittacus. Aforismi famosi ▪ articolo Come viene misurata la profondità dell'oceano? Risposta dettagliata ▪ articolo Miglio africano. Leggende, coltivazione, metodi di applicazione ▪ articolo Circuito oscillatorio. Enciclopedia dell'elettronica radio e dell'ingegneria elettrica
Homepage | Biblioteca | Articoli | Mappa del sito | Recensioni del sito
www.diagram.com.ua |










 Lascia il tuo commento su questo articolo:
Lascia il tuo commento su questo articolo: