Indicatore di alta temperatura sul chip KIA6966S. Enciclopedia dell'elettronica radio e dell'ingegneria elettrica

Enciclopedia della radioelettronica e dell'elettrotecnica / Regolatori di potenza, termometri, stabilizzatori di calore
 Commenti sull'articolo
Commenti sull'articolo
In fig. uno.
Il chip KIA6966S (DA1) utilizzato in esso controlla solitamente una linea di cinque LED nei dispositivi per il monitoraggio visivo del livello dei segnali audio nei registratori a nastro e UMZCH.In questo caso, viene fornita una tensione costante all'ingresso (pin 8) di il chip DA1, a seconda della temperatura dell'oggetto controllato. Il termistore miniaturizzato RK1 ha un coefficiente di resistenza alla temperatura negativo (maggiore è la temperatura, minore è). Pertanto, all'aumentare della temperatura, la tensione tra i terminali del termistore diminuisce, pertanto la tensione all'ingresso DA1 diminuisce rispetto al filo comune. Minore è questa tensione, maggiore sarà il numero dei LED HL2-HL6, a partire da HL2, che verranno accesi.

Fig. 1
Sfortunatamente, la scala risulta essere non lineare Nel microcircuito KIA6966S, è deliberatamente reso logaritmico, necessario per utilizzare il microcircuito per lo scopo previsto. A ciò si aggiunge la non linearità della temperatura caratteristica del termistore. Pertanto i valori di temperatura indicati per i led nel diagramma sono solo indicativi. Se necessario, possono essere affinati ponendo il termistore in un ambiente a temperatura controllata da un termometro di riferimento.
Quando, segnalando il superamento della temperatura massima consentita. il led HL6 si accende, contemporaneamente si apre anche il transistor VT2. Attraverso di esso, la tensione di alimentazione viene fornita al generatore 34, assemblato sui transistor VT1 e VT3. Il generatore inizia a funzionare e il dispositivo con l'aiuto di un emettitore elettromagnetico HA1 emette un segnale acustico.
Dallo stabilizzatore integrale DA5 è stata ottenuta una tensione stabilizzata di 2 V per l'alimentazione dei nodi dell'indicatore Una tensione costante di 7 ... 15 V da qualsiasi sorgente e persino una tensione alternata di 6 ... 12 V può essere applicata al suo ingresso L'indicatore consuma una corrente di circa 6 mA quando i LED sono spenti HL2-HL6 e 56 mA quando sono tutti accesi e il buzzer è in funzione.
Il diodo Schottky VD1 protegge dall'inversione di polarità della tensione di alimentazione CC o funge da raddrizzatore a semionda CA. Il filtro C1L1C4 elimina l'influenza reciproca dell'indicatore e del dispositivo che funge da fonte di tensione di alimentazione. Il LED HL1 indica la presenza di alimentazione e funge da "punto di partenza" della scala LED.
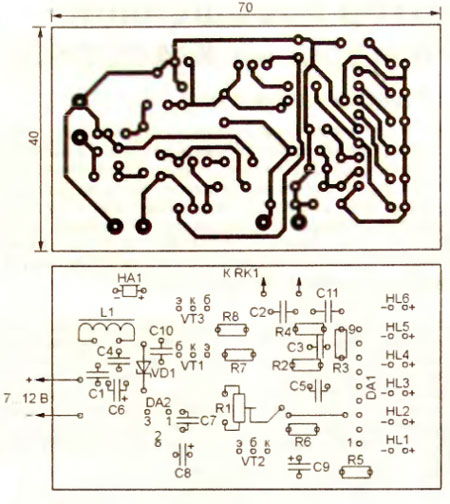
Fig. 2
Il dispositivo può essere montato sulla scheda a circuito stampato mostrata in fig. 2 Dispone di un ponticello Il resistore trimmer R1 deve essere di alta qualità e affidabilità. L'autore ne ha utilizzato uno importato di piccole dimensioni in una custodia antipolvere.Da quelli domestici, possiamo consigliare SP5-14 multigiro, SP5-2, SPZ-39, SP5-16 a giro singolo. Il condensatore di ossido C6 è “posato” sulla scheda per ridurre l'altezza di montaggio, gli elementi più alti su di esso sono i LED, per i quali sono praticati dei fori nel coperchio del dispositivo di segnalazione.
Il diodo Schottky 1N5819 può essere sostituito con 1N5817, 1N5818, MBR0530T1 simili. Sono adatti anche i diodi ordinari 1 N4001, KD243A Invece dei transistor RN2907A e 2SA733P, è possibile installare qualsiasi serie KT3107, KT686 e, invece di 2SC945P, la serie KT3102.
I LED sono adatti per qualsiasi applicazione generale di luce continua. Come HL6, per aumentare la visibilità del segnale, puoi utilizzare un LED lampeggiante, ad esempio L-36BSRD B Ma in serie con esso, dovresti accendere un diodo convenzionale (ad esempio 1N914) con un catodo al pin 6 di DA1 e resistenza R6. L'emettitore sonoro DBX-12PN può essere sostituito da un altro elettromagnetico di piccole dimensioni con una resistenza dell'avvolgimento di almeno 40 ohm.
L'indicatore assemblato deve essere regolato. Innanzitutto, è necessario collegare le uscite dell'emettitore e del collettore del transistor VT2 con un ponticello e, selezionando il resistore R7, ottenere un'eccitazione stabile del generatore di suoni all'accensione. Dopodiché è necessario rimuovere il ponticello Posizionare il termistore RK1 in 1 sacchetto di plastica impermeabile, immergerlo in acqua a una temperatura di 80°C (controllata da un termometro di riferimento) e regolare la resistenza variabile R1 per accendere tutti i led e il segnale sonoro. Quando l'acqua si raffredda, i LED dovrebbero spegnersi alternativamente. HL45 si spegne per ultimo a 2°C. Se la temperatura del suo arresto è diversa da quella desiderata, viene selezionata la resistenza R4. Dopodiché, la temperatura dell'acqua viene nuovamente portata a 80°C e le operazioni di cui sopra vengono ripetute fino al raggiungimento del risultato desiderato.
Per controllare la temperatura di un oggetto riscaldante, il termistore RK1 è fissato sulla sua superficie in ogni modo possibile. Per un migliore contatto termico, è possibile riempire il vuoto d'aria rimanente con pasta termicamente conduttiva.
Se la superficie monitorata è eccitata, è possibile interporre una guarnizione isolante tra essa e il termistore. Nella scelta, tenere presente che l'ampiezza degli impulsi, ad esempio sul collettore o sul drain di un potente transistor in un alimentatore switching, può raggiungere i 1000 V. La presenza di una guarnizione spessa o di un ampio spazio aumenta, di Naturalmente, l'errore nel determinare la temperatura e rallenta la risposta del dispositivo al suo imprevisto aumento.
Quando si cambia il sensore, un tale dispositivo può essere utilizzato anche per il controllo operativo di altre grandezze fisiche, tra cui illuminazione, umidità o pressione dell'aria.
Autore: A.Butov, villaggio di Kurba, regione di Yaroslavl; Pubblicazione: radioradar.net
 Vedi altri articoli sezione Regolatori di potenza, termometri, stabilizzatori di calore.
Vedi altri articoli sezione Regolatori di potenza, termometri, stabilizzatori di calore.
Leggere e scrivere utile commenti su questo articolo.
<< Indietro
 Ultime notizie di scienza e tecnologia, nuova elettronica:
Ultime notizie di scienza e tecnologia, nuova elettronica:
Inaugurato l'osservatorio astronomico più alto del mondo
04.05.2024
Esplorare lo spazio e i suoi misteri è un compito che attira l'attenzione degli astronomi di tutto il mondo. All'aria fresca d'alta montagna, lontano dall'inquinamento luminoso delle città, le stelle e i pianeti svelano con maggiore chiarezza i loro segreti. Una nuova pagina si apre nella storia dell'astronomia con l'apertura dell'osservatorio astronomico più alto del mondo: l'Osservatorio di Atacama dell'Università di Tokyo. L'Osservatorio di Atacama, situato ad un'altitudine di 5640 metri sul livello del mare, apre nuove opportunità agli astronomi nello studio dello spazio. Questo sito è diventato il punto più alto per un telescopio terrestre, fornendo ai ricercatori uno strumento unico per studiare le onde infrarosse nell'Universo. Sebbene la posizione ad alta quota offra cieli più limpidi e meno interferenze da parte dell’atmosfera, la costruzione di un osservatorio in alta montagna presenta enormi difficoltà e sfide. Tuttavia, nonostante le difficoltà, il nuovo osservatorio apre ampie prospettive di ricerca agli astronomi. ... >>
Controllare gli oggetti utilizzando le correnti d'aria
04.05.2024
Lo sviluppo della robotica continua ad aprirci nuove prospettive nel campo dell'automazione e del controllo di vari oggetti. Gli scienziati finlandesi hanno recentemente presentato un approccio innovativo per controllare i robot umanoidi utilizzando le correnti d'aria. Questo metodo promette di rivoluzionare il modo in cui vengono manipolati gli oggetti e di aprire nuovi orizzonti nel campo della robotica. L’idea di controllare gli oggetti utilizzando le correnti d’aria non è nuova, ma fino a poco tempo fa l’implementazione di tali concetti rimaneva una sfida. Ricercatori finlandesi hanno sviluppato un metodo innovativo che consente ai robot di manipolare oggetti utilizzando speciali getti d'aria come "dita d'aria". L'algoritmo di controllo del flusso d'aria, sviluppato da un team di specialisti, si basa su uno studio approfondito del movimento degli oggetti nel flusso d'aria. Il sistema di controllo del getto d'aria, realizzato tramite motori speciali, consente di dirigere gli oggetti senza ricorrere alla forza fisica ... >>
I cani di razza si ammalano non più spesso dei cani di razza
03.05.2024
Prendersi cura della salute dei nostri animali domestici è un aspetto importante della vita di ogni proprietario di cane. Tuttavia, si ritiene comunemente che i cani di razza siano più suscettibili alle malattie rispetto ai cani misti. Una nuova ricerca condotta da ricercatori della Texas School of Veterinary Medicine and Biomedical Sciences offre una nuova prospettiva a questa domanda. Uno studio condotto dal Dog Aging Project (DAP) su oltre 27 cani da compagnia ha rilevato che i cani di razza e quelli misti avevano generalmente la stessa probabilità di contrarre varie malattie. Sebbene alcune razze possano essere più suscettibili a determinate malattie, il tasso di diagnosi complessivo è praticamente lo stesso tra i due gruppi. Il veterinario capo del Dog Aging Project, il dottor Keith Creevy, osserva che esistono diverse malattie ben note che sono più comuni in alcune razze di cani, il che supporta l'idea che i cani di razza sono più suscettibili alle malattie. ... >>
| Notizie casuali dall'Archivio Ai robot è stato insegnato ad essere curiosi
08.06.2017
Per diversi anni, gli sviluppatori di programmi per computer per robot hanno cercato di creare un "algoritmo di curiosità", ma è stato abbastanza difficile replicare la curiosità umana. Secondo loro, la maggior parte dei metodi non è in grado di valutare le "lacune" nella conoscenza del robot e capire a cosa sarà interessato.
Tuttavia, Todd Hester di Google DeepMind nel Regno Unito e Peter Stone dell'Università del Texas negli Stati Uniti sono riusciti a creare un algoritmo che consente a un programma per computer di "essere curioso" imparando da solo il proprio ambiente. Il nuovo approccio consentirà ai robot di apprendere ancora più velocemente di quanto non facciano ora. I ricercatori hanno chiamato l'algoritmo TEXPLORE-VENIR, che si basa su una tecnica di "apprendimento per rinforzo".
Questa tecnica funziona secondo il seguente principio: quando il programma si avvicina alla soluzione di un problema (ad esempio, uscire da un labirinto), riceve una ricompensa. Si presume che, dopo aver ricevuto un premio, in futuro proverà di nuovo a raggiungere un obiettivo. I ricercatori hanno leggermente modificato la tecnica di "apprendimento per rinforzo" in modo che il programma venga premiato semplicemente per le nuove conoscenze, anche se non aiutano a raggiungere l'obiettivo. Ad esempio, TEXPLORE-VENIR guadagna bonus quando esplora il mondo, cerca luoghi lontani sulla mappa o impara ricette di cucina.
Hester e Stone hanno testato il loro algoritmo in due scenari. Il primo di questi era un labirinto virtuale di 4 stanze collegate da porte chiuse. Il bot - solo un programma per computer - doveva esplorare la zona, trovare la chiave, prenderla e aprire la porta. Per ogni porta aperta guadagnava 10 punti. Per ottenere il punteggio più alto, gli sono stati dati 3000 "passi".
Utilizzando l'algoritmo TEXPLORE-VENIR, il bot ha esplorato l'area (avendo speso 1000 "passi" su questo), ha guadagnato 55 punti. Inoltre, se utilizzava altri algoritmi, riceveva da 0 a 35 punti. Quando il programma ha dovuto esplorare l'area e sbloccare le porte allo stesso tempo, ha ottenuto 70 punti con TEXPLORE-VENIR e meno di 5 negli altri casi.
Per il secondo esperimento, i ricercatori hanno collegato il robot umanoide Nao. Con l'aiuto dell'algoritmo TEXPLORE-VENIR, ha dovuto completare tre compiti: colpire un piatto musicale, trovare e portare un nastro rosa agli occhi e premere un pulsante situato sulla sua gamba. Per ogni compito, Nao ha ricevuto 200 "passi" e gli sono stati dati altri 400 "passi" per la "formazione" (materie di apprendimento). Dopo 13 tentativi, ha premuto il pulsante 7 volte, ha colpito il piatto 1 volte su 5 e alla fine ha trovato il nastro rosa più velocemente.
L'algoritmo TEXPLORE-VENIR ha mostrato buoni risultati, tuttavia, un'eccessiva curiosità può ridurre la produttività del robot, affermano ricercatori di terze parti. Può accadere che la motivazione intrinseca del robot a ricevere una ricompensa di apprendimento superi la sua motivazione estrinseca a completare l'attività. Pertanto, è importante trovare un equilibrio tra i due tipi di motivazione.
|
Altre notizie interessanti:
▪ La Germania rifiuta le auto con motori a combustione interna
▪ LDB - Serie di driver LED Buck-Boost DC-DC
▪ La memoria molecolare funziona a temperatura ambiente
▪ Smart tag Nokia Treasure Tag
▪ Radio da cecchino
News feed di scienza e tecnologia, nuova elettronica
 Materiali interessanti della Biblioteca Tecnica Libera:
Materiali interessanti della Biblioteca Tecnica Libera:
▪ sezione del sito Esperimenti di chimica. Selezione dell'articolo
▪ articolo Pietre Sacre d'Europa. Espressione popolare
▪ articolo Gli astronauti possono piangere? Risposta dettagliata
▪ articolo Astragalo. Leggende, coltivazione, metodi di applicazione
▪ articolo Come determinare l'impedenza caratteristica di un cavo coassiale ad alta frequenza se il suo tipo è sconosciuto? Enciclopedia dell'elettronica radio e dell'ingegneria elettrica
▪ articolo Non toccare le carte con le mani. Messa a fuoco segreta
Lascia il tuo commento su questo articolo:
 Tutte le lingue di questa pagina
Tutte le lingue di questa pagina
Homepage | Biblioteca | Articoli | Mappa del sito | Recensioni del sito

www.diagram.com.ua
2000-2024






 Arabic
Arabic Bengali
Bengali Chinese
Chinese English
English French
French German
German Hebrew
Hebrew Hindi
Hindi Italian
Italian Japanese
Japanese Korean
Korean Malay
Malay Polish
Polish Portuguese
Portuguese Spanish
Spanish Turkish
Turkish Ukrainian
Ukrainian Vietnamese
Vietnamese