|
|






 Arabic
Arabic Bengali
Bengali Chinese
Chinese English
English French
French German
German Hebrew
Hebrew Hindi
Hindi Italian
Italian Japanese
Japanese Korean
Korean Malay
Malay Polish
Polish Portuguese
Portuguese Spanish
Spanish Turkish
Turkish Ukrainian
Ukrainian Vietnamese
Vietnamese|
ENCICLOPEDIA DELLA RADIOELETTRONICA ED ELETTRICA Computer di bordo per bici elettrica. Enciclopedia dell'elettronica radio e dell'ingegneria elettrica
Enciclopedia della radioelettronica e dell'elettrotecnica / Casa, casa, hobby Presentiamo ai nostri lettori un computer di bordo basato su un microcontrollore PIC16F876A con sensore di corrente esterno, progettato per una bicicletta elettrica. Sul suo display visualizza sia i parametri di guida che la tensione della batteria, la corrente, la potenza e il consumo di energia da essa consumata. Il dispositivo è realizzato su una base di elementi accessibili ed è facilmente replicabile. Per monitorare la modalità operativa delle biciclette elettriche vengono utilizzati vari strumenti di misurazione. I parametri elettrici vengono misurati da analizzatori di potenza [1, 2], i parametri di movimento sono monitorati da vari ciclocomputer elettronici [3] e persino da tachimetri meccanici [4]. Esistono anche display speciali per le biciclette elettriche [5], che mostrano tutti i parametri necessari, ma hanno un costo elevato. Sulla base di ciò, ho sviluppato un computer di bordo per una bicicletta elettrica su un microcontrollore PIC16F876A con un sensore di corrente esterno. Principali caratteristiche tecniche
Tra parentesi è indicata la risoluzione di visualizzazione del parametro corrispondente. Il computer di viaggio visualizza l'ora corrente con incrementi di 1 minuto. Lo schema del computer di bordo è mostrato in Fig. 1. Il microcontrollore DD2 (PIC16F876A-I/P) funziona da un oscillatore stabilizzato da un risonatore al quarzo ZQ2 con una frequenza di 8 MHz. Il connettore XP1 è fornito per la programmazione del microcontrollore. Ad esso ho collegato il programmatore PICkit2. Il programma del microcontrollore è stato sviluppato nell'ambiente grafico Flowcode [6].
Le misurazioni di tensione e corrente vengono effettuate utilizzando l'ADC interno a 10 bit del microcontrollore. Quando si misura la tensione, il segnale dal partitore di tensione R5R9R12 viene inviato all'ingresso analogico AN0 (RA0) del microcontrollore. Quando si misura la corrente, la caduta di tensione attraverso il sensore di corrente Rш amplifica l'amplificatore operazionale OPA241 (DA1). Dall'uscita dell'amplificatore operazionale, il segnale amplificato arriva all'ingresso analogico AN1 (RA1) del microcontrollore. Il guadagno viene impostato tagliando il resistore R13 nel circuito di feedback dell'amplificatore operazionale. Invece di OPA241, è possibile utilizzare quasi tutti i singoli amplificatori operazionali rail-to-rail in un pacchetto SO-8, ad esempio OPA340 o TS507. Il programma calcola il consumo di potenza ed elettricità in base ai valori di corrente e tensione misurati. Come sensore di corrente remoto è stato utilizzato uno shunt di misura standard 75SHISV.2-0.5-15 con una caduta di tensione di 75 mV con una corrente di 15 A. In sostituzione è possibile utilizzare qualsiasi shunt standard con una resistenza di 5... 10 mOhm o simile fatto in casa [7]. Il computer di bordo è alimentato da un regolatore di tensione lineare formato dal transistor di regolazione VT1 e dal microcircuito TL431ID (DA2). Nel circuito di alimentazione è installato un circuito VD1R10C6C7 che riduce le interferenze create da un motore elettrico in funzione. I resistori R16 e R17 assicurano una distribuzione uniforme della tensione tra i condensatori C6 e C7. La tensione di ingresso massima consentita (tensione della batteria) dipende dalla tensione collettore-emettitore consentita del transistor VT1, dalla sua dissipazione di potenza consentita, dalla qualità della dissipazione del calore e dalla potenza rilasciata sui resistori R19-R22. Con gli elementi stabilizzatori indicati nello schema, la tensione della batteria non deve superare i 75 V. Tuttavia, il dispositivo è in grado di visualizzare sull'indicatore valori fino a 102,3 V. Il computer di bordo è realizzato su un circuito stampato monofaccia in fibra di vetro di 1,5 mm di spessore. Un disegno dei conduttori del circuito stampato e la disposizione degli elementi su di esso sono mostrati in Fig. 2 e fig. 3. Nella fig. 4 ne mostra l'aspetto.
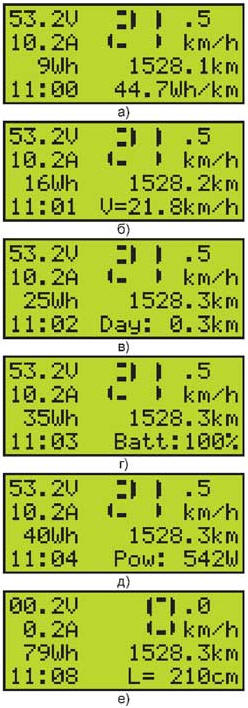
Sul lato anteriore della scheda è presente un microcontrollore PIC16F876A, un risonatore al quarzo ZQ2, un chip orologio in tempo reale DS1307, resistori di sintonizzazione, un transistor VT1, un connettore XP1 (blocco pin angolare PLS-5R) e un blocco PLS-14 per collegare l'indicatore HG1. La parte di accoppiamento del connettore, il blocco presa PBS-1, è saldata nei fori di montaggio dell'indicatore HG14. Nel supporto BH-1 è installata una batteria al litio G2032 CR3 da 642 V. Tutti gli altri elementi sono montati sul lato dei conduttori stampati. Un risonatore cilindrico al quarzo ZQ1 (32768 Hz) è saldato nei fori sul lato dei conduttori stampati accanto ai pin 1 e 2 del microcircuito DD1. La parte superiore del suo corpo è saldata ad una sezione di lamina collegata ad un filo comune. La scheda del computer di bordo è fissata alla scheda LCD su due supporti metallici alti 10...12 mm utilizzando viti M3. Vengono utilizzati resistori e condensatori di dimensione standard 120b per il montaggio su superficie. I condensatori C6 e C7 sono all'ossido di tantalio per il montaggio superficiale in un telaio di dimensione E. Possono essere sostituiti con altri condensatori della stessa dimensione con una capacità di 6,8...22 μF per una tensione di 35 V. I restanti condensatori sono di dimensione ceramica 1206:0805 o XNUMX:XNUMX. Un sostituto del transistor npn BD139 in uno stabilizzatore di tensione può essere un altro transistor della stessa struttura in un pacchetto TO-126 con una tensione collettore-emettitore consentita superiore a 80 V, ad esempio BD179, MJE182 2N5192, BF469, KT817G. Sotto l'alloggiamento del transistor è posizionata una striscia di sottile foglio di rame o alluminio con un'area di circa 6 cm.2, fungendo da dissipatore di calore. Il transistor è fissato alla scheda con una vite e un dado M3. Per ridurre l'errore di misura shunt Rш, dovrebbe essere posizionato il più vicino possibile al terminale negativo della batteria. Tutti i collegamenti al computer di bordo possono essere effettuati con cavi di piccola sezione. Per collegare l'interruttore reed SF1 (sensore di percorso), derivare R al computer di bordoш, e batteria GB1, viene utilizzato un connettore PC7TV non mostrato nello schema, installato sul case del computer di bordo. L'interruttore a lamella è stato preso da un ciclocomputer elettronico guasto. I parametri nel computer di bordo vengono visualizzati su un display LCD a quattro righe WH1604A con una tensione di alimentazione di 5 V senza retroilluminazione. La sua assenza è spiegata dall'elevata corrente consumata dalla retroilluminazione (220 mA), che porterebbe al surriscaldamento del transistor VT1. Sul display LCD vengono visualizzati contemporaneamente sette parametri: tensione, corrente, quantità di elettricità consumata, ora corrente, velocità, chilometraggio totale e consumo specifico di energia elettrica dal momento in cui il computer di bordo viene acceso (vedere Fig. 4). Il valore della velocità viene visualizzato sullo schermo utilizzando pseudografici. Ciò ha permesso di portare l'altezza delle cifre a due righe, il che ha reso molto più semplice leggere la velocità sullo schermo. Il computer di bordo si controlla tramite i pulsanti SB1 “M” (imposta i minuti), SB2 “H” (imposta le ore) e SB3 “P” (modalità di visualizzazione). Premendo successivamente il pulsante SB3 nell'angolo inferiore destro dello schermo, al posto del consumo specifico di energia elettrica (Fig. 5,a), della velocità media (Fig. 5,b), del chilometraggio giornaliero (Fig. 5,c ), la carica della batteria (Fig. 5,d) o la potenza consumata dal motore elettrico (Fig. 5,d).
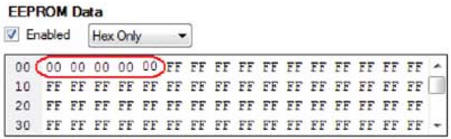
Tenendo premuto il pulsante SB3 per più di 5 s, il programma entra nella modalità di impostazione della circonferenza della ruota (Fig. 5, e). Tenendo premuto ulteriormente questo pulsante, la circonferenza della ruota cambia a passi di 1 cm variando da 201 a 215 cm (ruota da 26 pollici). Alla prima accensione del dispositivo, la circonferenza della ruota è impostata su 210 cm Dopo 5 s dal rilascio del pulsante SB3 si esce dalla modalità di impostazione della circonferenza della ruota e il valore impostato viene scritto nella EEPROM del microcontrollore. Quando si programma il microcontrollore, è necessario scrivere degli zeri nelle prime cinque celle EEPROM (Fig. 6) per impostare a zero il valore iniziale della distanza percorsa. Se ciò non viene fatto, il chilometraggio sarà di 1525,7 km.
Il programma salva la distanza percorsa nella EEPROM del microcontrollore 3 secondi dopo l'arresto della bici elettrica. Per indicare il momento della registrazione, nell'angolo in alto a destra del display LCD viene visualizzato il simbolo di un asterisco per 0,3 s. Allo spegnimento, il programma reimposta i valori del consumo specifico di energia elettrica, della velocità media e del chilometraggio giornaliero. Per l'installazione dell'apparecchio è possibile utilizzare al posto della batteria una fonte di alimentazione da laboratorio con una tensione di uscita di 25...50 V e una corrente di carico consentita di almeno 5 A. Come equivalente di carico è possibile utilizzare un potente Resistenza a filo avvolto con una resistenza di 5...10 Ohm. Configurare il dispositivo nel seguente ordine. Innanzitutto, calibra il suo voltmetro. Per fare ciò, la tensione viene fornita al dispositivo da una batteria o da una fonte di alimentazione da laboratorio, monitorandola con un accurato voltmetro digitale. Modificando la resistenza del resistore di sintonizzazione R9, si ottengono le stesse letture tra il voltmetro standard e il dispositivo da regolare. Il misuratore di corrente viene quindi calibrato. Un amperometro digitale accurato è collegato in serie al carico. Applicando la tensione di alimentazione, modificando la resistenza del resistore di sintonia R13, si ottengono le stesse letture tra l'amperometro standard e il dispositivo da regolare. Se necessario, selezionando il resistore R25 si imposta il contrasto ottimale dell'immagine sull'indicatore. Il computer di bordo può essere installato in qualsiasi custodia idonea in plastica o metallo. File del circuito stampato del computer di bordo in formato Sprint Layout 5.0 e programma del microcontrollore: ftp://ftp.radio.ru/pub/2016/05/tripcomp.zip. Letteratura
Autore: A. Nefediev
Pelle artificiale per l'emulazione del tocco
15.04.2024 Lettiera per gatti Petgugu Global
15.04.2024 L'attrattiva degli uomini premurosi
14.04.2024
▪ Il vertebrato più longevo identificato ▪ L'acqua è stata riscaldata a una temperatura record ▪ Lo scimpanzé come l'apice dell'evoluzione ▪ Memoria Samsung DRAM CXL 2.0 128 GB
▪ Sezione del sito Telefonia. Selezione dell'articolo ▪ Articolo LED. Storia dell'invenzione e della produzione ▪ articolo Perché c'è una croce rovesciata sul trono del Papa? Risposta dettagliata
Homepage | Biblioteca | Articoli | Mappa del sito | Recensioni del sito
www.diagram.com.ua |




 Lascia il tuo commento su questo articolo:
Lascia il tuo commento su questo articolo: